Athlete Robot
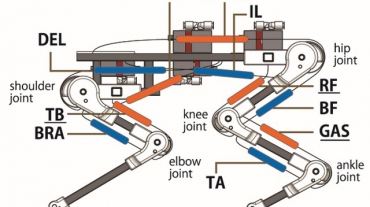
筋配置
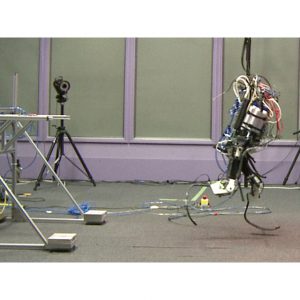
走行
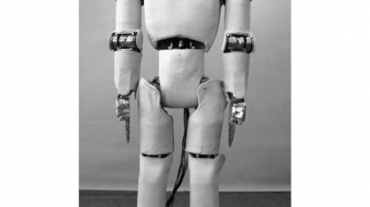
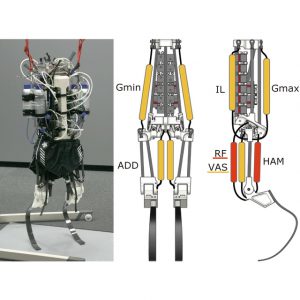
ヒトの筋骨格系が跳躍・走行といったダイナミック運動に果たす役割の解明、そうした動作の工学的実現を目指して製作された脚ロボット。ロボットの高さは約1.2m、重さは約10kgである。走行を実現したバージョンでは、下腿部に義足ランナー用の義足を用いている。0.5mの跳躍、1.0mからのソフトランディング、拮抗具合の調節による転倒方向制御、直立姿勢の維持、ボールキック、発射台からの5歩の走行 (2.42m/s)を実現した。走行実現にあたり、ヒトの走行中の筋電図データを基に動力学シミュレータ上で筋賦活パタンの最適化を行った。
[1] R. Niiyama and Y. Kuniyoshi, “Design principle based on maximum output force profile for a musculoskeletal robot,” Industrial Robot,2010. PDF[2] R. Niiyama, S. Nishikawa and Y. Kuniyoshi, “A Biomechanical Approach for Open-loop Bipedal Running with a Musculoskeletal Athlete Robot,” Advanced Robotics,2012.