等身大ヒューマノイド
骨格
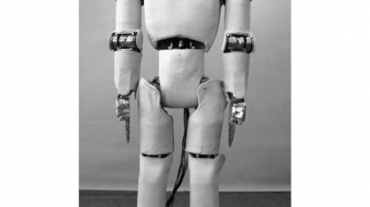
ヒューマノイドロボット
身長155cm、体重70kgで、片腕6自由度、片脚6自由度、腰3自由度、首3自由度、片眼3自由度、片手5自由度の全身46自由度のロボット。丸みを帯びた身体形状をもち、大きな出力のモータを低減速比で用いているため、高速かつ高トルクな関節を実現している。体内LANシステムを採用しており、省配線で多モータの制御、多センサの入力が可能となっており、切り貼り触覚センサを全身に実装、1800 点以上の触覚情報がとれる。
[1] A. Nagakubo, Y. Kuniyoshi and G. Cheng, “The ETL-Humanoid System — A High-Performance Full Body Humanoid System for Versatile Real World Interaction,” Advanced Robotics, 2003.[2] Y. Kuniyoshi, Y. Ohmura, A. Nagakubo, “Whole Body Haptics for Augmented Humanoid Task Capabilities,” ISRR2007 ,2007.
起き上がり動作
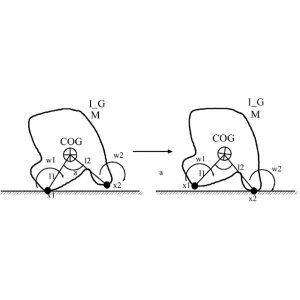
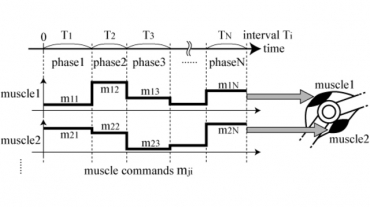
モデル

起き上がりの様子
転がりを含む起き上がり動作は、足を着地する際に、適切な姿勢と大きな角運動量が必要であり、足着地時にタスクの成否を決定するダイナミクスの制約がある。この、着地時の情報の局在性は、解析的に確かめられ、モーションキャプチャによるヒトの動作解析でも分散の小ささから示唆され るものである。また、ヒトが起き上がり動作を行うビデオを途中まで複数の被験者に観察してもらい、起き上がりの成否を推定してもらう実験をおこなった結果においても同様であった。着地時の制約を満たすためには、脚の振りのタイミングが重要であるため、分布触覚データと姿勢センサか らこのタイミングのみを適切に判断することで起き上がり動作を実現した。これは着地時の強い制約をロバストに満たす動作を触覚を用いて実現したといえる。このような分布触覚センサを利用したダイナミックな全身運動を実現した例は従来存在しなかった。
[1] Y. Kuniyoshi, Y. Ohmura, K. Terada, A. Nagakubo, S. Eitoku and T. Yamamoto, “Embodied Basis of Invariant Features in Execution and Perception of Whole Body Dynamic Actions — Knacks and Focuses of Roll-and-Rise Motion,” Robotics and Autonomous Systems, 2004.[2] Y. Kuniyoshi, Y. Ohmura, K. Terada and A. Nagakubo, “Dynamic Roll-And-Rise Motion By An Adult-Size Humanoid Robot,” IJHR, 2004.
抱え上げ動作
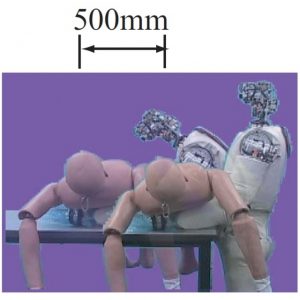
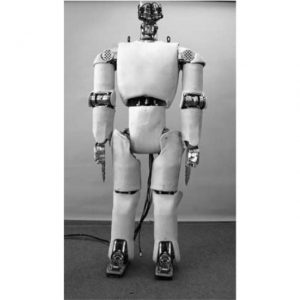
66kgの人形の移動介助動作
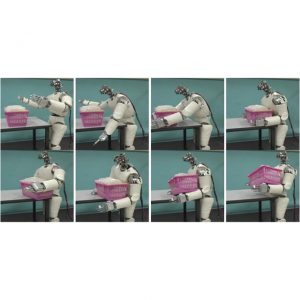
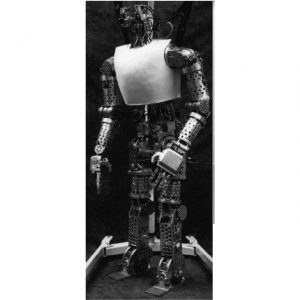
32kgの机上の物体の抱え上げ
非常に複雑でモデル化困難な実世界で働くロボットを実現するためには、冗長なセンサ情報を処理し、運動に生かす技術が重要になると考えられる。触覚データを基に、適切にベッドや机などと接触を利用することで、等身大ヒューマノイドにより66kgの人形のベッド上での移動介助動作、 32kgの机上の物体の抱え上げを実現した。
[1] Y. Ohmura and Y. Kuniyoshi, “Humanoid Robot Which Can Lift a 30kg Box by Whole Body Contact and Tactile Feedback,” IROS, 2007.