力学的三次元対称化法
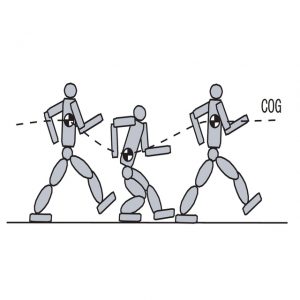
重心の鉛直方向変動

シミュレーションでの歩容生成
2足歩行の生成においては従来、重心の鉛直方向の変動は十分に小さいとして、重心高さを定数として扱ってきた。しかし、重心の上下動を含む歩行や走行を扱うには重心の鉛直運動を考える必要がある。そこで、鉛直方向(z軸方向)の運動方程式にもx、y方向と同じ力学的性質を持たせることでx、y軸と同じように扱えるように考えた。これを力学的三次元対称化法と呼ぶ。この方法により動力学シミュレーション上で、重心の上下 動を含む歩行、走行を生成できることを確かめた。
[1] K. Terada and Y. Kuniyoshi, “Online Gait Planning with Dynamical 3D-Symmetrization method,” Humanoids, 2007.[2] 寺田耕志, 國吉康夫, “重心の鉛直運動を含む二足歩容の高速生成法,” ロボティクスシンポジア, 2007.
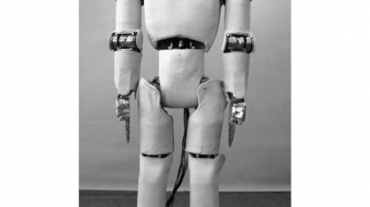
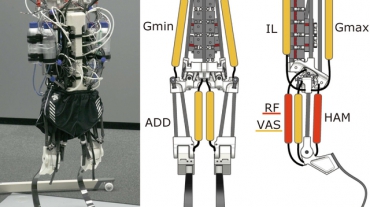
転倒制御
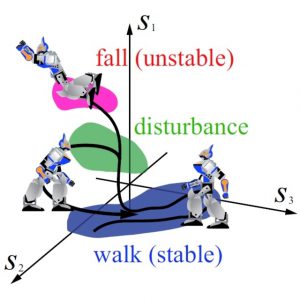
転倒制御
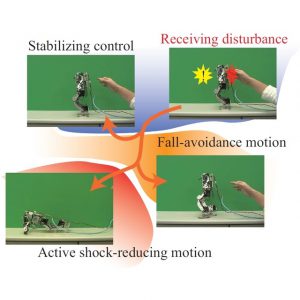
実機での実験
ロボットにおいて安全性、ハードウェアの保護の観点から、転倒に対する対応は重要である。そこで、転倒の危険性に応じて安定化制御、踏み出し動作、受身動作を適切に選択する方法を考案した。判定手法としては、経験学習によるものと、ZMPフィードバックの過渡応答に注目した予測 ZMPを用いて算出された転倒危険度に基づくものの2種類を提案した。踏み出し動作には予測ZMPを用い境界条件緩和法による動作生成を、受け身動作には力学的三次元対称化法による動作生成を用いた。ロボット実機にこの手法を実装することで有効性の検証を行った。
[1] K. Ogata, K. Terada and Y. Kuniyoshi, “Falling Motion Control for Humanoid Robots While Walking,” Humanoids, 2007.[2] K. Ogata, K. Terada and Y. Kuniyoshi, “Real-time Selection and Generation of Fall Damage Reduction Actions for Humanoid Robots,” Humanoids, 2008.