実世界上でのダイナミック多自由度運動の学習
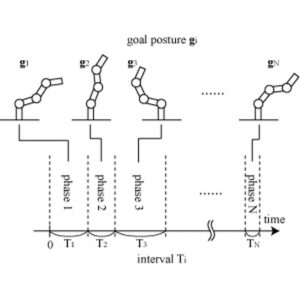
仮想目標切替パタン
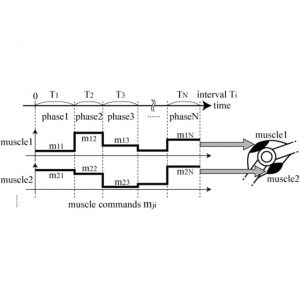
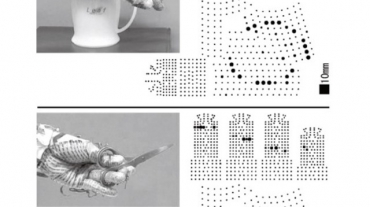
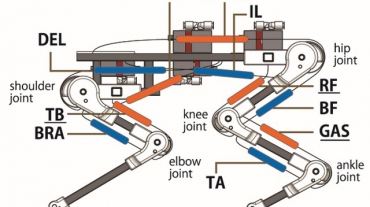
筋指令切替パタン
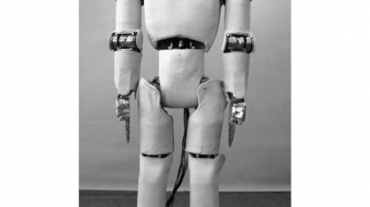
少ない前提知識、少ない試行回数で運動学習ができることはロボットの実世界上での運動獲得に有用であると考えられる。そのための運動表現として運動指令のステップ関数表現を提案している。これは複数回の運動指令パターンの切り替えにより運動を生成する運動表現である。操作量としては、関節角度の目標値のほか、筋骨格ロボットの筋の拮抗状態にも拡張可能である(筋指令切替パタン)。この方法は軌道を細かく設定するのではなく、目標のダイナミクスを切り替えていくため、運動表現の圧縮に有効と考えられる。学習手法としては、初めにランダム探索による広域探索を行い、そのうち評価値の高いパラメータの周辺を山登り探索を行う方法を取っている。この手法を用いることで実ロボットによる起き上がり動作の獲得、筋骨格ロボットによる跳躍着地運動の獲得を実現した。
[1] 柿谷慧, 新山龍馬, 國吉康夫, “筋骨格ロボットを用いた跳躍運動の学習, ロボティクスシンポジア,” 2009. PDF[2] 柿谷慧, 寺田耕志, 國吉康夫, “仮想目標切替パタンの探索による実ロボットの多様な動作獲得,” Robomec, 2008.