手の接触運動計測グローブ

触覚センサグローブ

手の運動計測システム
人間の手指の動作メカニズムを計測解析するために開発された、片手1052点の触覚点と18個の小型姿勢センサモジュールを搭載したシステム。基本概念はサイバーコピースーツと同様である。小型柔軟触覚センサを手のしわに沿った形状に設計することで、手の触感や運動の阻害低減と高密度の計測を両立している[1]。また、薄く柔軟な外装膜で挟み込み繰り返し着脱使用可能となっている。小型姿勢センサモジュールは3軸加速度と3軸ジャイロを内蔵し、ジャイロのドリフトは計測法の工夫により削除している[2]。
[1] T. Sagisaka, Y. Ohmura, A. Nagakubo, Y. Kuniyoshi, “High-density conformable tactile sensing glove,” Humanoids, 2011.[2] 大村吉幸,國吉康夫, “慣性センサによる手の姿勢計測時のドリフト削除,” ロボティクスシンポジア, 2013.
切り貼り触覚センサ
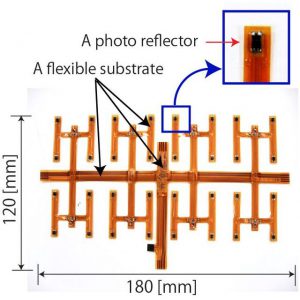
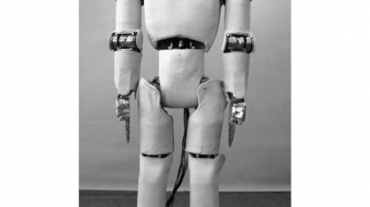
切り貼り触覚センサモジュール
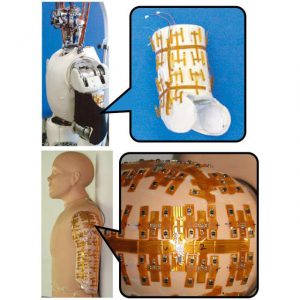
実装例(上:等身大ヒューマノイド,下:ダミー人形)
主に等身大ヒューマノイドロボットや赤ちゃんロボットの全身を覆うために開発した。 センシング領域・センサ密度を調節でき、曲面適応性と低コスト性を備えた触覚センサモジュール。通信機能を内蔵しており、複数枚を連結して大面積を覆う際も省配線で済む。ツリー状のフレキシブル基板の形状設計と回路トポロジーの工夫から、不要なエレメントの切り取り(領域調節)、基板の折り曲げ(密度調節)、曲面適応性を実現し、一種類のモジュールで複雑・多様な曲面へのセンサ実装を可能にした。各センサエレメントは光学式で圧力を検出する。反射型フォトインタラプタに発泡ウレタンフォームを接触させた構造をとり、ウレタンフォーム内の光拡散領域がウレタンフォームの変形によって変化することを利用している。このエレメントは小型・軽量であり、発泡ウレタンフォームの色や硬さを選定することで感度の調節も可能である。 人間の全身で接触を計測するサイバーコピースーツにも用いている。
[1] 大村吉幸, 瀬田尚子, 長久保晶彦, 國吉康夫, “切り貼り触覚センサシステム,” 日本ロボット学会学術講演会, 2005.[2] Y. Ohmura, Y. Kuniyoshi, A. Nagakubo, “Conformable and Scalable Tactile Sensor Skin for Curved Surfaces,” ICRA, 2006.
高伸縮性分布触覚センサ
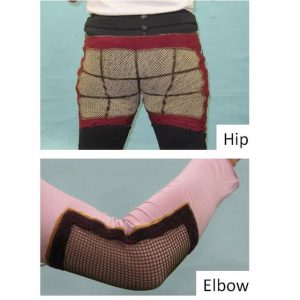
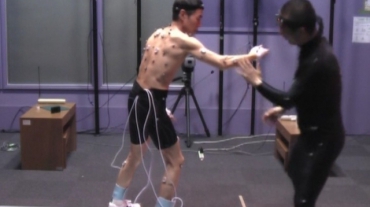
EIT触覚を人間に装着した様子
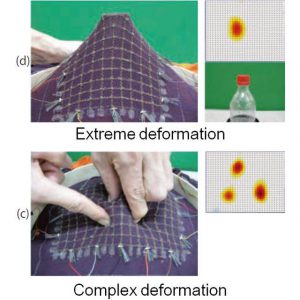
伸縮に左右されず圧力を検出する様子
切り貼り触覚センサでカバーすることが難しいロボットの関節部やヒトの柔軟な皮膚表面を覆うため、感圧領域から一切の配線を取り除くことで高い伸縮性を実現しながら、接触や伸縮の分布を計測できる触覚センサを開発した。この触覚センサはCTスキャンに用いられるElectrical Impedance Tomography (EIT)技術を応用している。EITとは導電体の周囲に多数の電極を配置し、電流を入力したとき出力される電位パターンから、逆問題解析によって導電体内部の抵抗分布を推定する方法である。感圧領域は導電性の布やゴムシートなどで構成できるため、高い伸縮性が実現できる。導電材料の層を重ねると伸縮と圧力を分離して検出することもできる。
[1] 長久保晶彦, A. Hassan, 國吉康夫, “逆問題解析に基づく触覚分布センサ,” 日本ロボット学会誌, 2007.[2] H. Alirezaei, A. Nagakubo, Y. Kuniyoshi, “A Tactile Distribution Sensor Which Enables Stable Measurement Under High and Dynamic Stretch,” 3DUI, 2009. PDF
小型柔軟触覚センサ
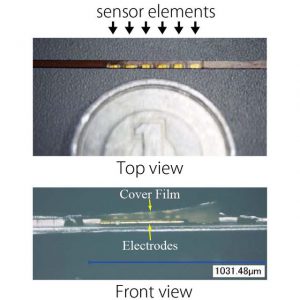
実際の小型柔軟触覚センサエレメント

応用例:手の圧力分布の高密度計測
基本概念は切り貼り触覚センサと同じだが、センサエレメントを小型・薄型・柔軟にすることで耐久性・柔軟性・分解能を飛躍的に向上した触覚センサ。微細パターニング技術を応用し0.5mm x 1mmサイズの感圧構造と読み出しのための多数の配線を0.1mmの薄さのフレキシブル基板に内蔵している。 ロボットや人間の計測に用いているのみでなく、商用化を視野に官民と共同開発を進めている。
[1] 大村吉幸,鷺坂隆志,長久保晶彦,國吉康夫,尾崎和行, “フレキシブル基板に埋め込まれた小型・柔軟触覚センサ,” 日本ロボット学会学術講演会, 2011. PDF