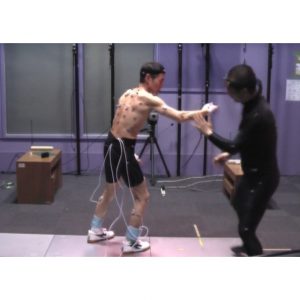
サイバーコピースーツ
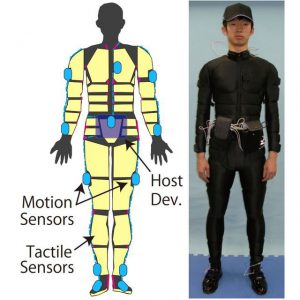
スーツに組み込まれたセンサの配置

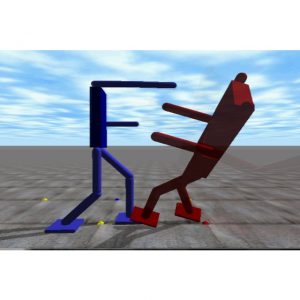
スーツのデータから再構成されたCG(階段降下)
全身装着型の内界式モーションキャプチャ+触覚計測システム。全身に1856点の触覚点、15個の姿勢センサモジュールを搭載。触覚センサとしては切り貼り触覚センサを実装している。姿勢センサモジュールは3軸加速度と3軸ジャイロを内蔵する。内界式のモーションキャプチャシステムであることから、光学式のモーションキャプチャシステムで問題となる隠れが発生せず、また専用の部屋を必要としないため、複数人が接触するようなタスクの計測、広い範囲での動作計測の点で優れている。
[1] 藤森祐樹,大村吉幸,原田達也,國吉康夫, “全身分布触覚センサと姿勢角センサを統合したモーションキャプチャスーツの開発,” ロボティクスシンポジア, 2009. PDF[2] Y. Fujimori, Y. Ohmura, T. harada and Y. Kuniyoshi, “Wearable Motion Capture Suit with Full-body Tactile Sensors,” ICRA, 2009. PDF
自他人体操作
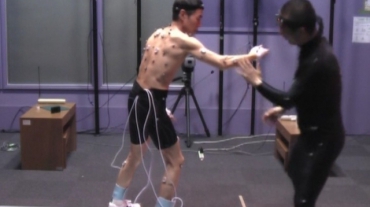
押し動作スキルのコツ抽出
シミュレーションでの再現
介護のような自他人体操作動作において、他者が能動的に振る舞う場合でもヒトは巧みに相手の運動を利用することにより効率良い動作を実現している。巧みに振る舞うヒトの動作を計測、解析することにより、こうした運動のロボットによる実現につながることが期待される。こうしたスキルを持つ人物として古武術研究家の甲野善紀氏による押し動作を扱った。解析の結果、押し動作には、倒れこむ勢いの利用や腕部の剛性の向上が有効 であることが確認された。さらにシミュレーションや筋骨格ロボットの実験によりその有効性を検証した。
[1] 尾形邦裕, 國吉康夫, 甲野善紀, “人型ロボット制御のための押し動作における自他身体操作スキルの計測と解析,” RSJ, 2011. PDF[2] 尾形邦裕, 國吉康夫, “他者を押す動作の運動スキルにおける有効性の検証と考察,” RSJ, 2012. PDF
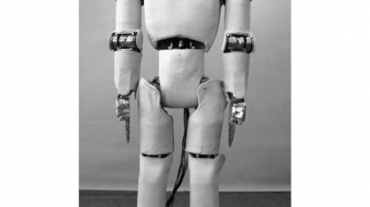
SKILLROBOT
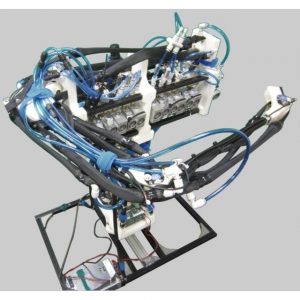
外観
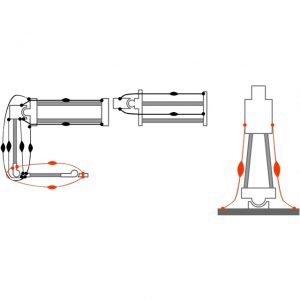
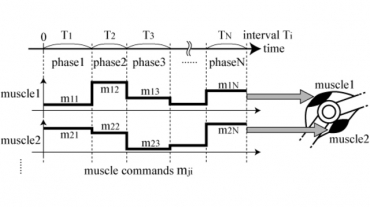
筋配置
甲野善紀氏の押し動作の再現を目指して製作された上半身型片腕ロボット。腰関節、肩関節(2自由度)、肘関節、手首関節を備え、12種の筋を備える。腰関節の拮抗駆動による全身の体重移動、手首と肘にまたがる2関節筋の拮抗による肘関節の剛性強化が可能であり、甲野善紀氏の運動解析により得られたコツが実装できる。コツを利用した運動においてヒトの後退動作を誘導できることを示した。
[1] 田中一敏, 尾形邦裕, 國吉康夫, “熟練者の運動解析に基づく筋骨格ロボットによる押し動作におけるスキルの再現,” RSJ, 2012. PDF
人体搬送
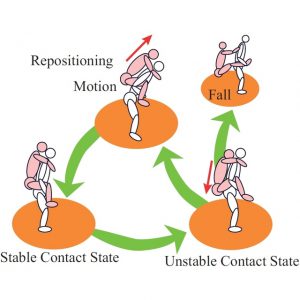
おんぶ動作

移乗動作
人体搬送の手段としておんぶ動作、移乗動作を取り上げ、介護者と被介護者の全身運動、触覚情報を計測することでこれらの動作のコツの解析を行った。おんぶ動作においては、相手の身体の弾性を活用することによって小さく跳躍するという動きで背負い直しを実現していることと、その際 に前屈することにより効率を上げていることがわかった。移乗動作においては、転倒力モーメントの増大のために両脚を広げる、後方の足を持ち上げ足裏の力を0にするという2点のコツが見られた。
[1] K. Ogata, D. Shiramatsu, Y. Ohmura and Y. Kuniyoshi, “Analyzing the “Knack” of Human Piggyback Motion Based on Simultaneous Measurement of Tactile and Movement Data as a Basis for Humanoid Control,” IROS, 2009. PDF[2] K. Ogata and Y. Kuniyoshi, “Analyzing the “Knacks” of Transferring Human and Developing a Two-Body Integrated Model as a Basis for Humanoid Control,” Humanoids, 2009. PDF