PIGORASS
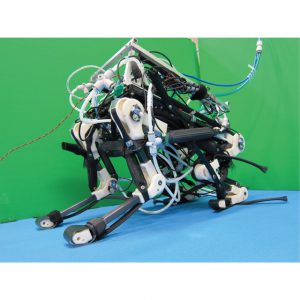
外観
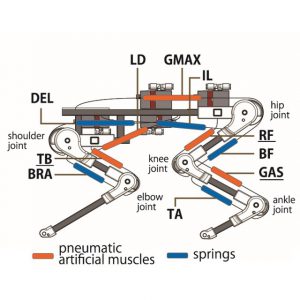
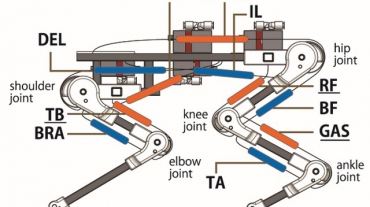
筋配置
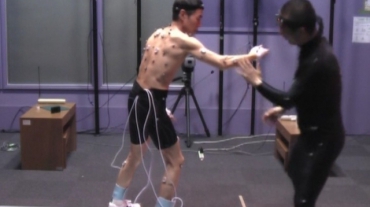
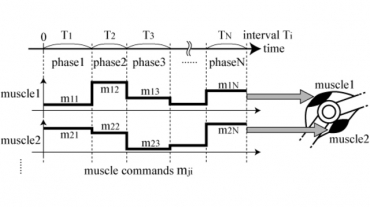
筋骨格系を備えた4脚ロボット。関節には角度依存モーメントアーム機構を採用している。身体と神経系が運動を生成するメカニズムの解明のために製作された。神経系は赤ちゃんシミュレータに用いているものと同じ脊髄延髄モデルを用いており、モジュール間には相互の結合はない。シミュレーションにおいて、神経系の結合がないにも関わらず2関節筋による身体の拘束が情報の流れを増加させていることを定量的に評価した。さらに実機実験において、身体を通した情報の流れにより自己組織的に多様な協調動作が生まれることを確認した。
[1] Y. Yamada, S. Nishikawa, K. Shida, R. Niiyama and Y. Kuniyoshi, “Neural-Body Coupling for Emergent Locomotion: a Musculoskeletal Quadruped Robot with Spinobulbar Model,” IROS, 2011. PDF