|
Journals

|
8.
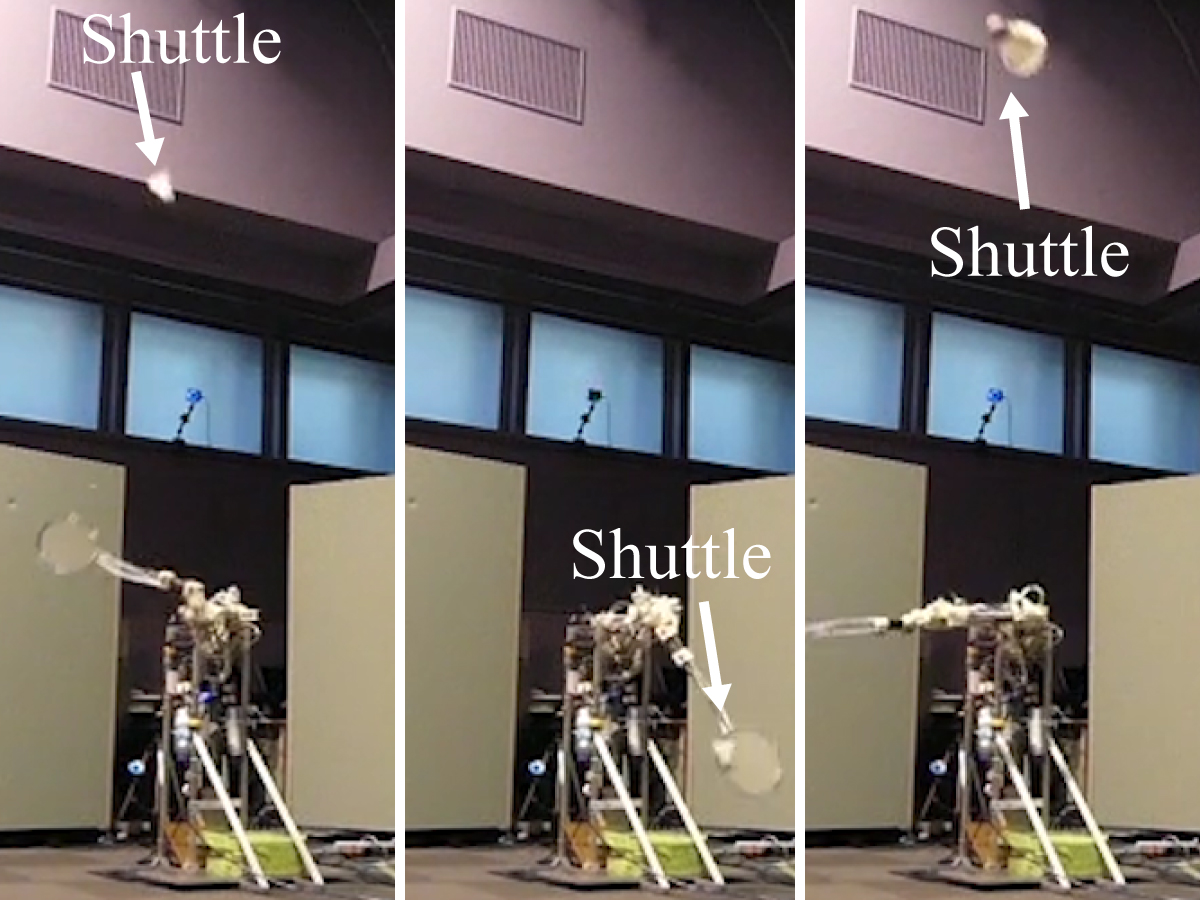
"Immediate generation of jump-and-hit motions by a pneumatic humanoid robot using a lookup table of learned dynamics".
Kazutoshi Tanaka, Satoshi Nishikawa, Ryuma Niiyama and Yasuo Kuniyoshi.
IEEE Robotics and Automation Letters,
Early Access, 2021.
DOI: 10.1109/LRA.2021.3076959
article (link) |
bibtex
|
|
7.
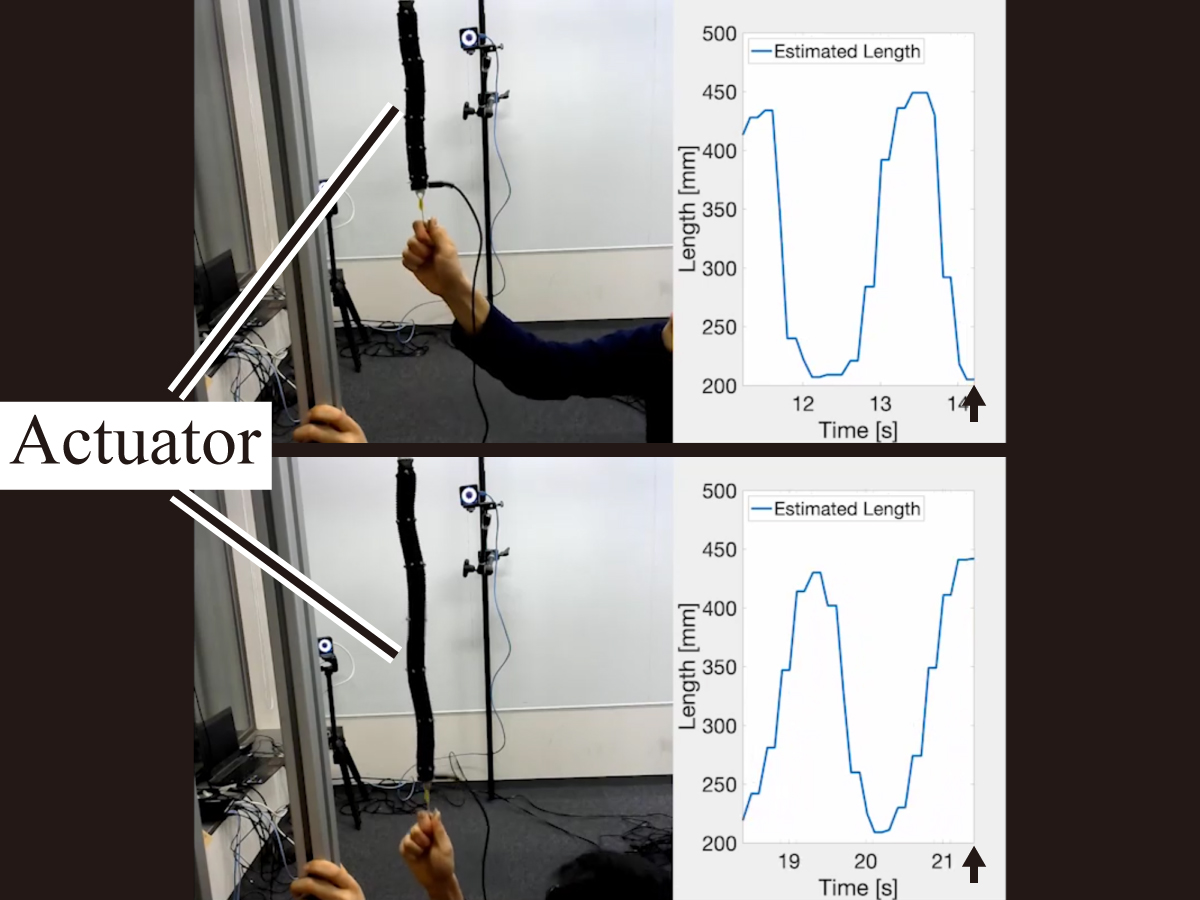
"Acoustic Length Sensor for Soft Extensible Pneumatic Actuators With a Frequency Characteristics Model".
Ken Takaki, Yoshitaka Taguchi, Satoshi Nishikawa, Ryuma Niiyama and Yoshihiro Kawahara.
IEEE Robotics and Automation Letters,
Vol.4, No.4, pp.4292-4297, 2019.
DOI: 10.1109/LRA.2019.2931273
article (link) |
bibtex
|
|
6.
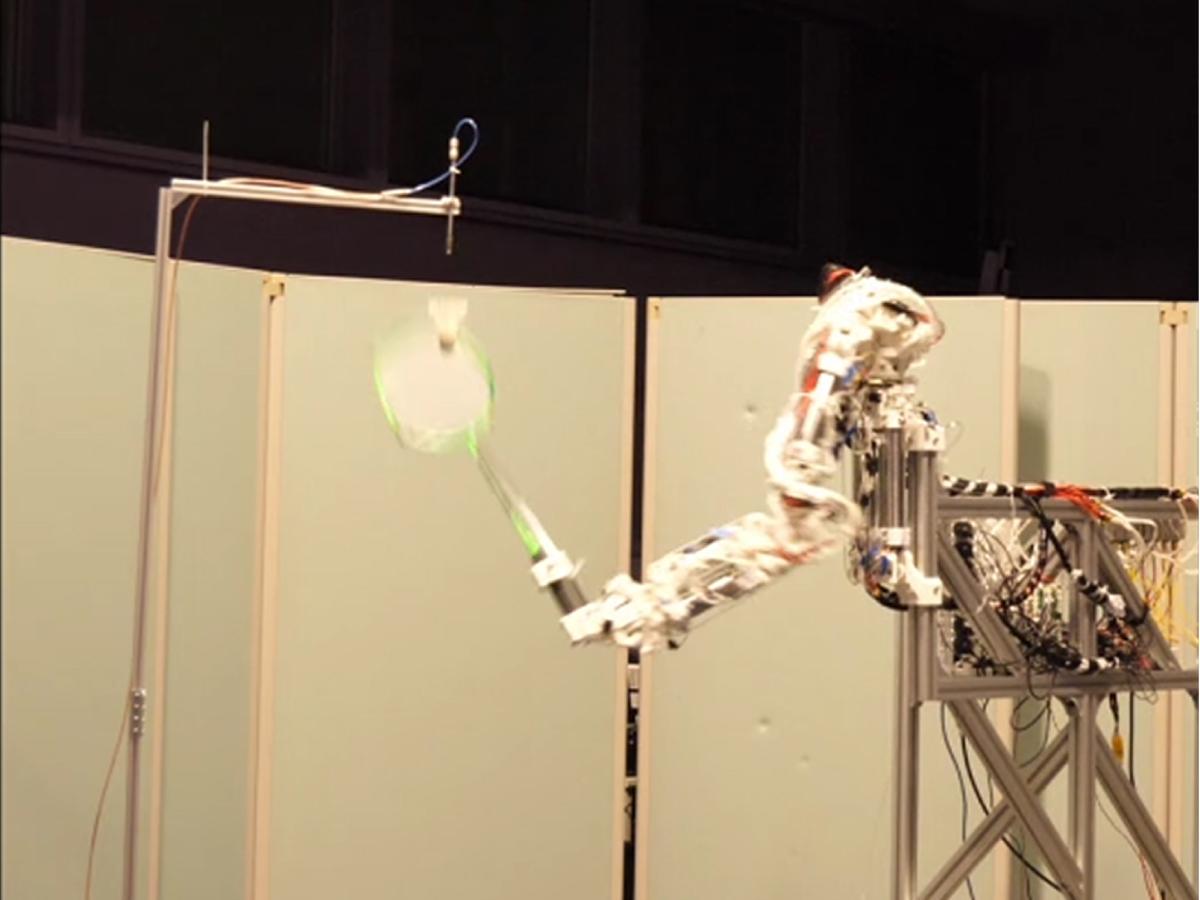
"High-Speed Humanoid Robot Arm for Badminton Using Pneumatic-Electric Hybrid Actuators".
Shotaro Mori, Kazutoshi Tanaka, Satoshi Nishikawa, Ryuma Niiyama and Yasuo Kuniyoshi.
IEEE Robotics and Automation Letters,
Vol.4, No.4, pp.3601-3608, 2019.
DOI: 10.1109/LRA.2019.2928778
article (link) |
bibtex
|

|
5.
"Physical Reservoir Computing in Tensegrity with Structural Softness and Ground Collision Dynamics".
Kenichi Fujita, Shogo Yonekura, Satoshi Nishikawa, Ryuma Niiyama and Yasuo Kuniyoshi.
Journal of the Institute of Industrial Applications Engineers,
Vol.6, No.2, pp.92-99, 2018.
DOI: https://doi.org/10.12792/jiiae.6.92
article (link) |
bibtex
|
|
4.
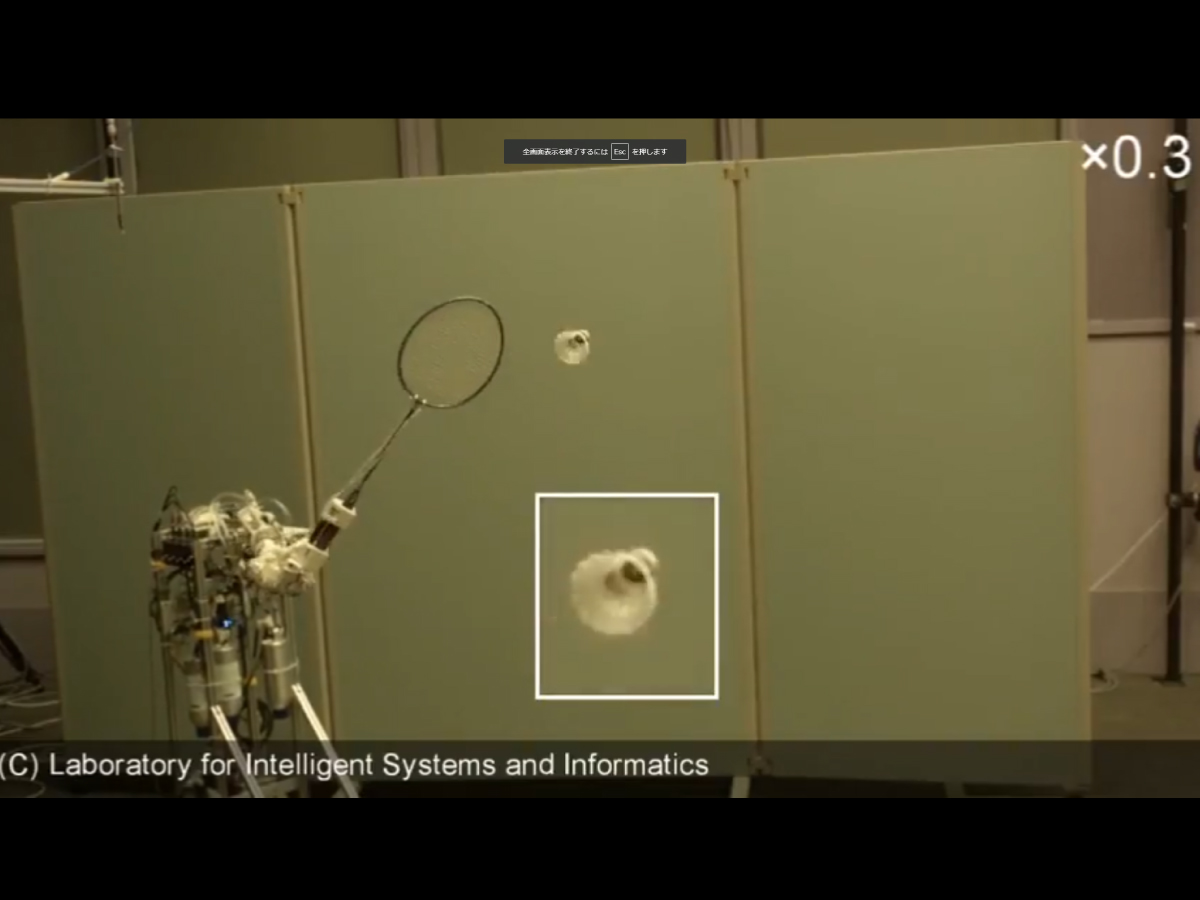
"High-speed and Lightweight Humanoid Robot Arm for a Skillful Badminton Robot".
Shotaro Mori, Kazutoshi Tanaka, Satoshi Nishikawa, Ryuma Niiyama and Yasuo Kuniyoshi.
IEEE Robotics and Automation Letters,
Vol.3, No.3, pp.1727-1734, 2018.
DOI: 10.1109/LRA.2018.2803207
article (link) |
bibtex |
video (UT ISI Lab)
|
|
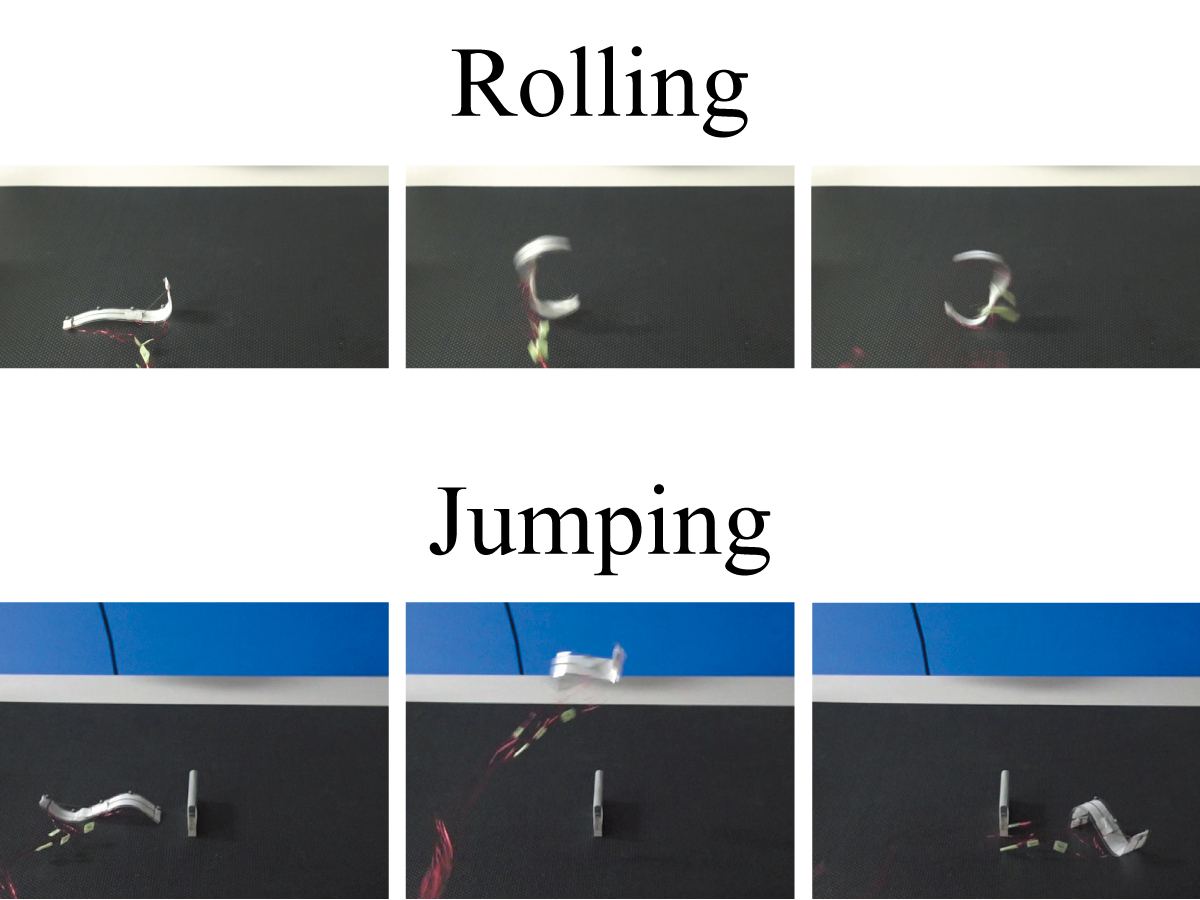
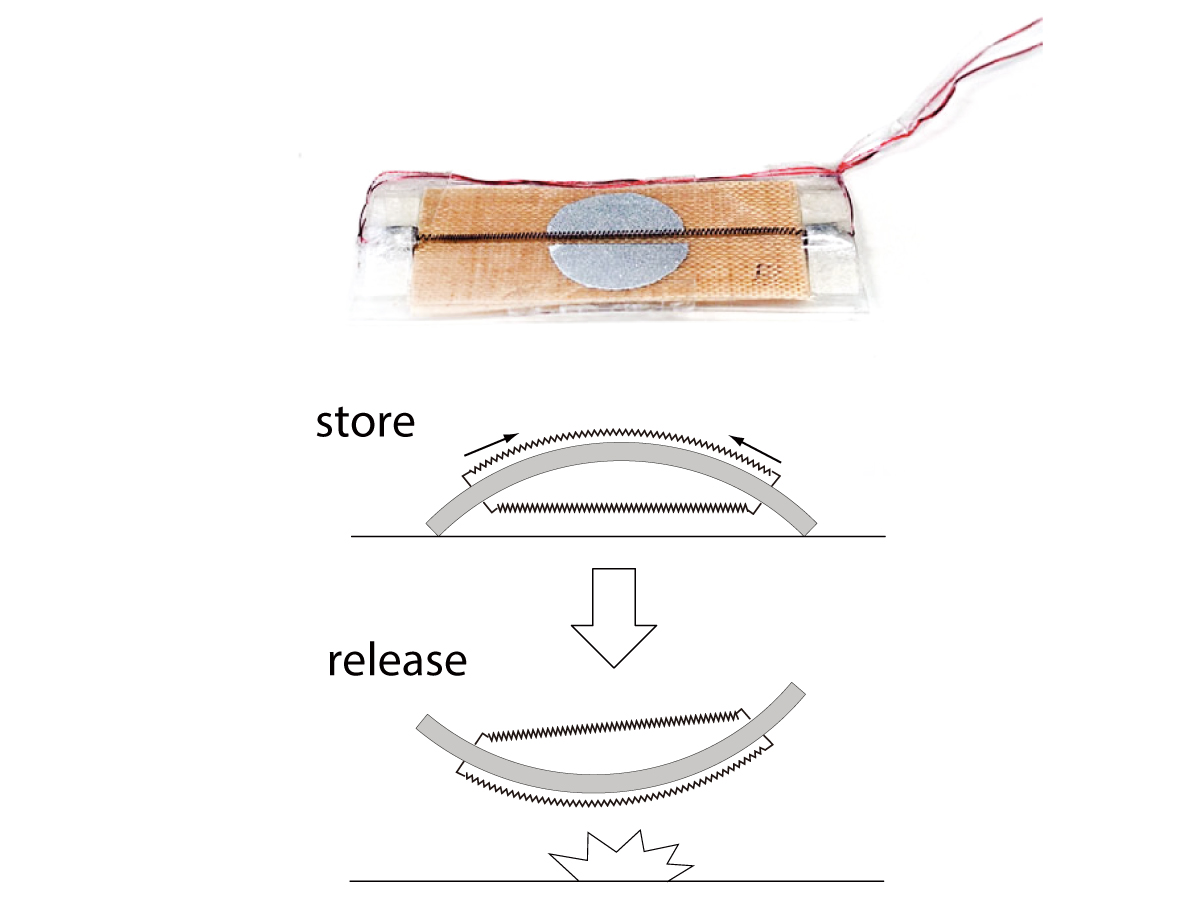
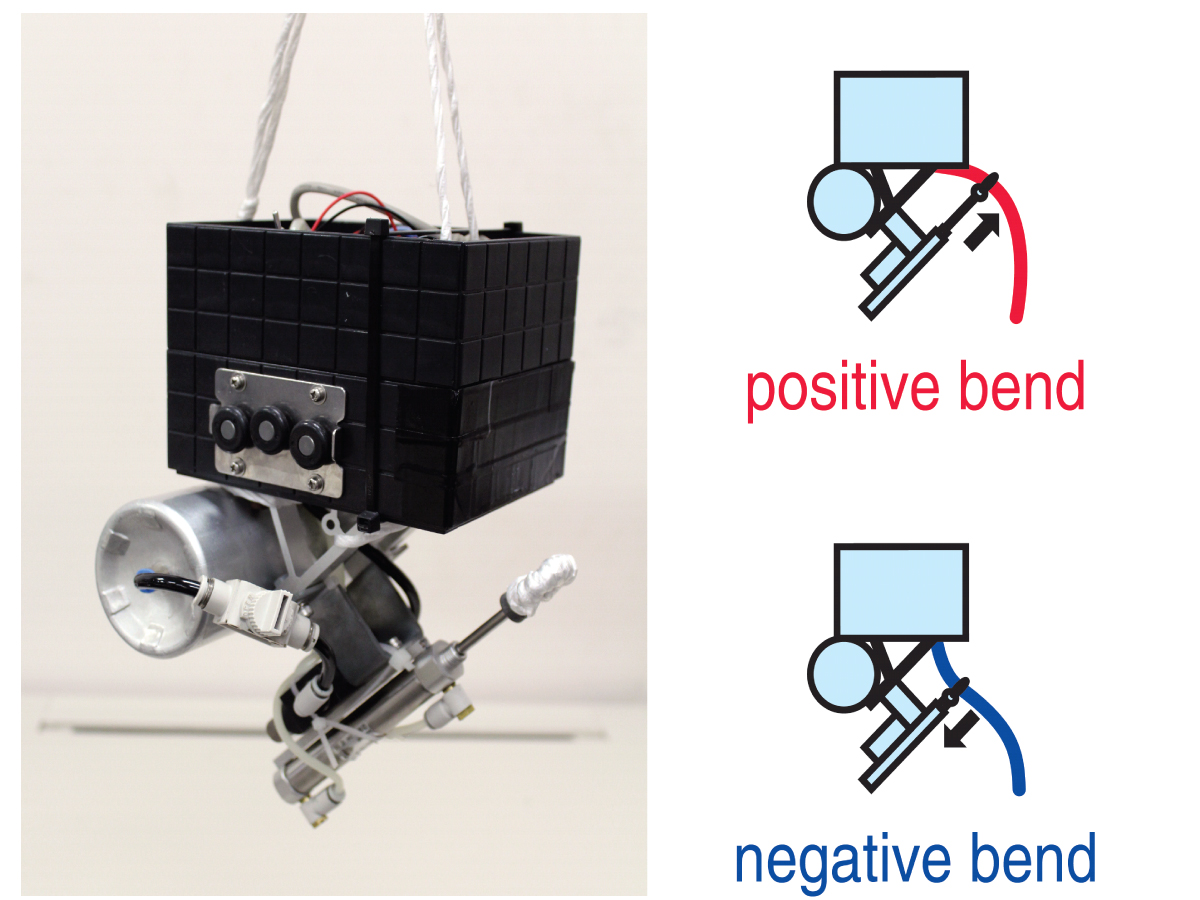
3.
"Coordinated Use of Structure-integrated Bistable Actuation Modules for Agile Locomotion".
Satoshi Nishikawa, Yusuke Arai, Ryuma Niiyama and Yasuo Kuniyoshi.
IEEE Robotics and Automation Letters,
Vol.3, No.2, pp.1018-1024, 2018.
DOI: 10.1109/LRA.2018.2794617
article (link) |
bibtex |
video (UT ISI Lab) |
video (ICRA 2018)
|
|
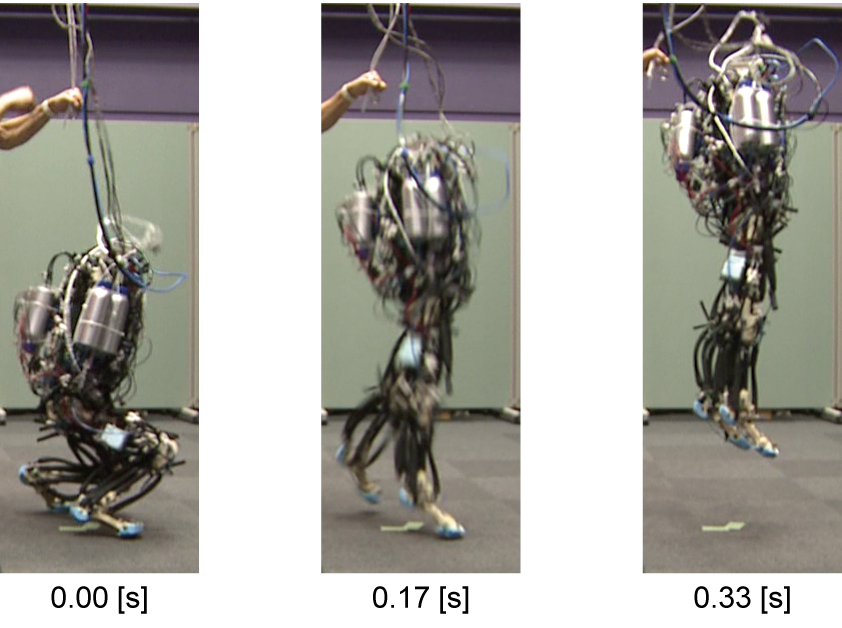
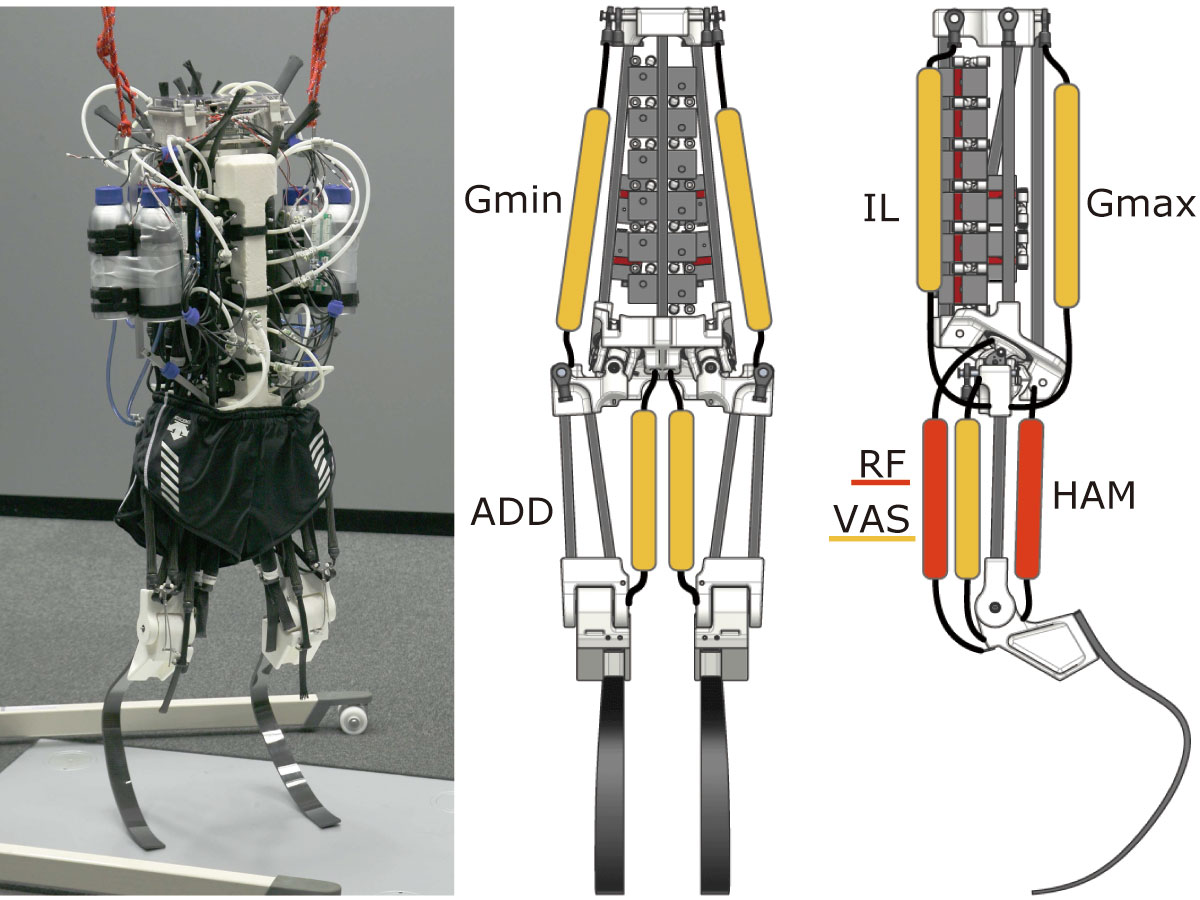
2.
"A Musculoskeletal Bipedal Robot Designed with Angle-Dependent Moment Arm for Dynamic Motion from Multiple States".
Satoshi Nishikawa, Kazutoshi Tanaka, Kazuya Shida, Toshihiko Fukushima, Ryuma Niiyama and Yasuo Kuniyoshi.
Advanced Robotics,
Vol.28, No.7, pp.487-496, 2014.
article (link) |
bibtex
|
|
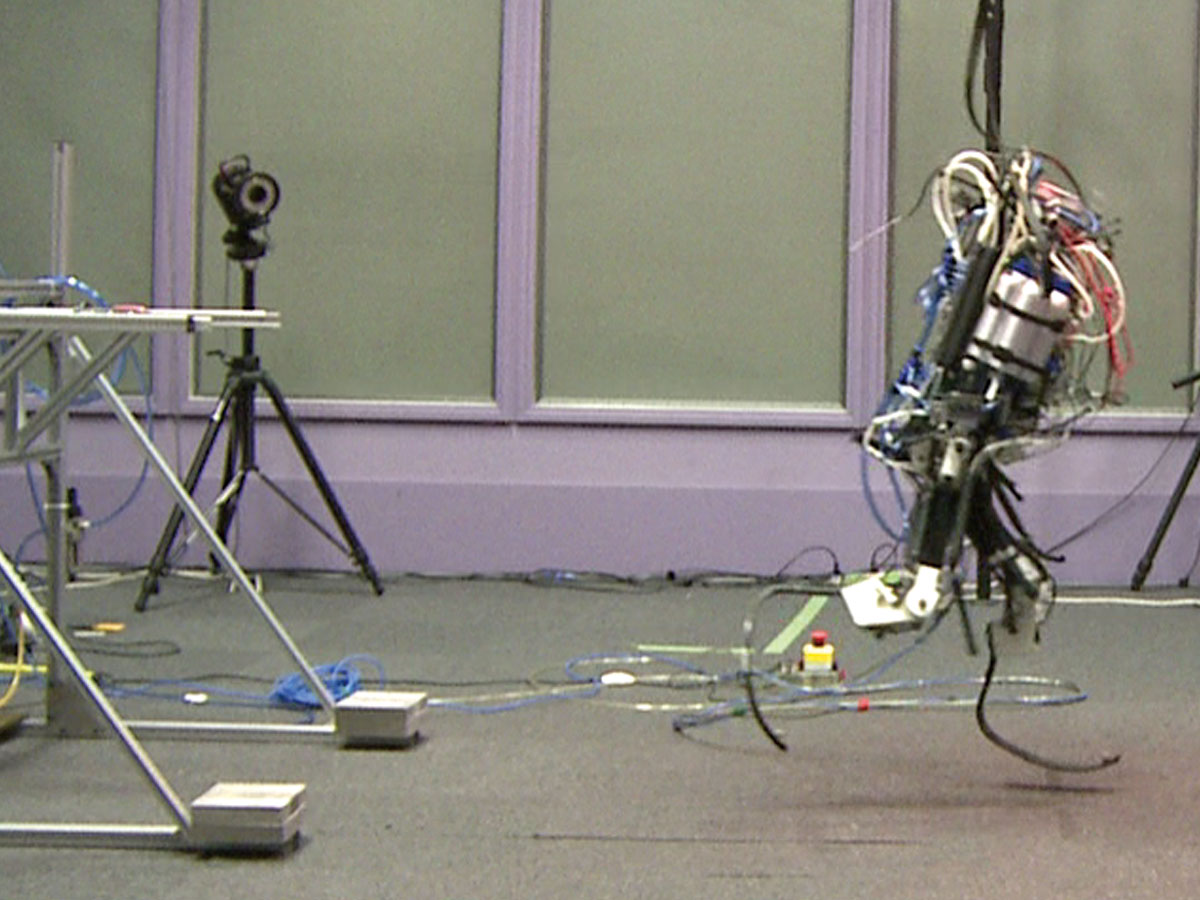
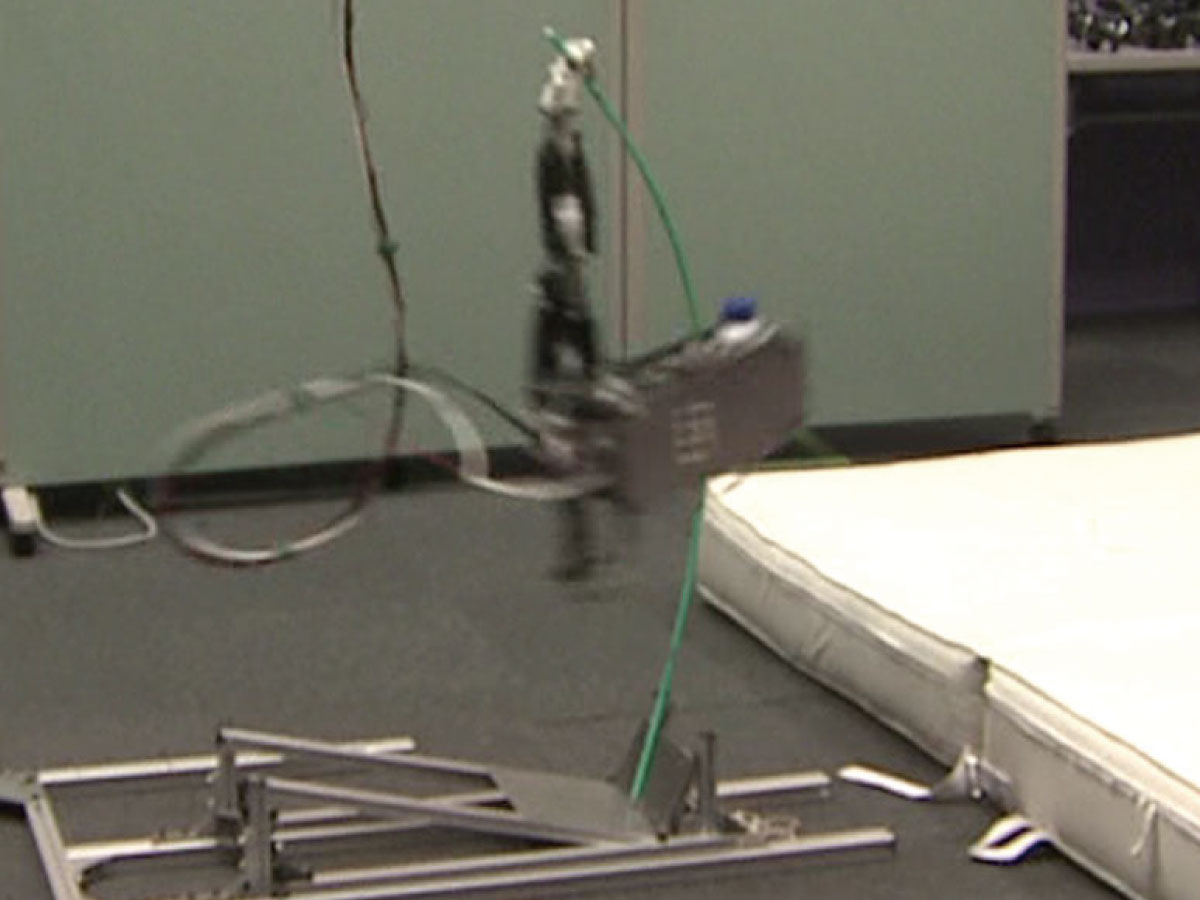
1.
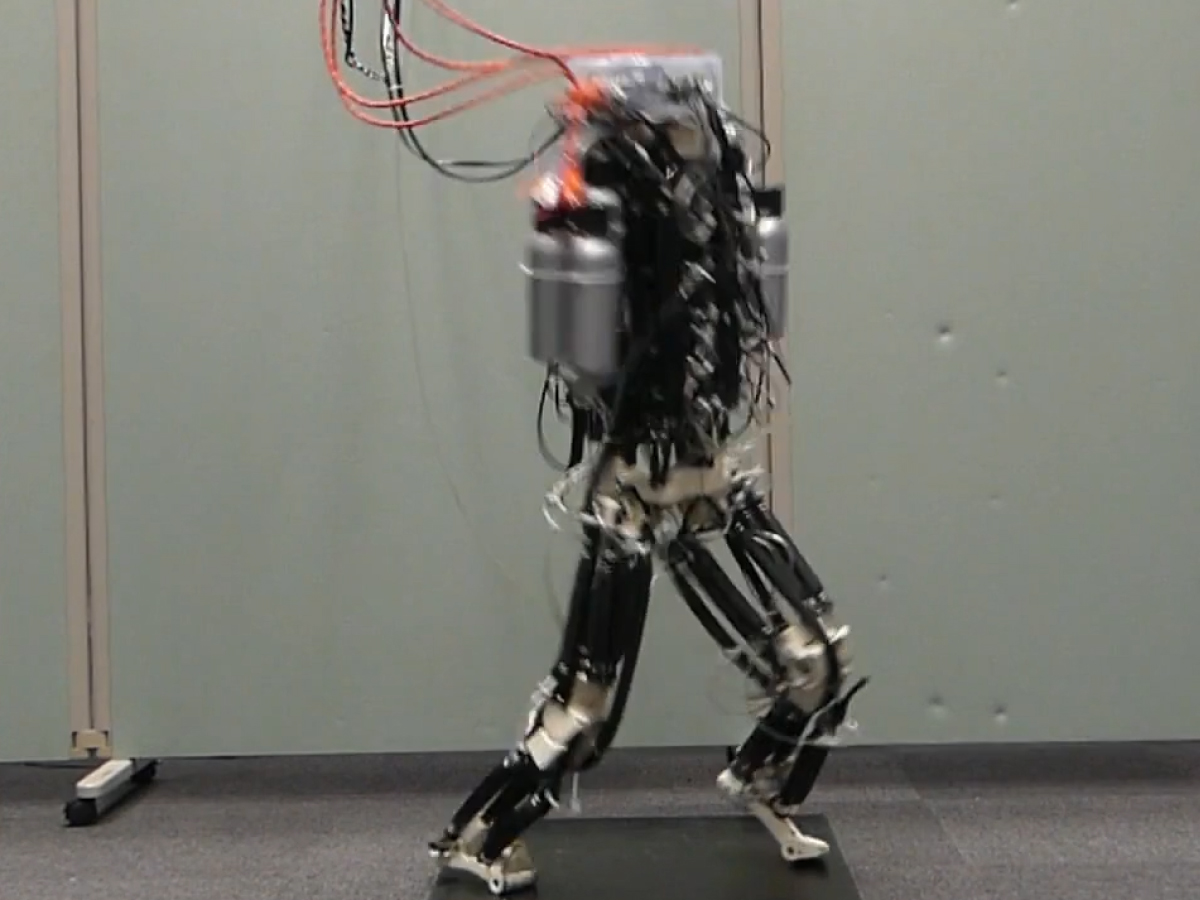
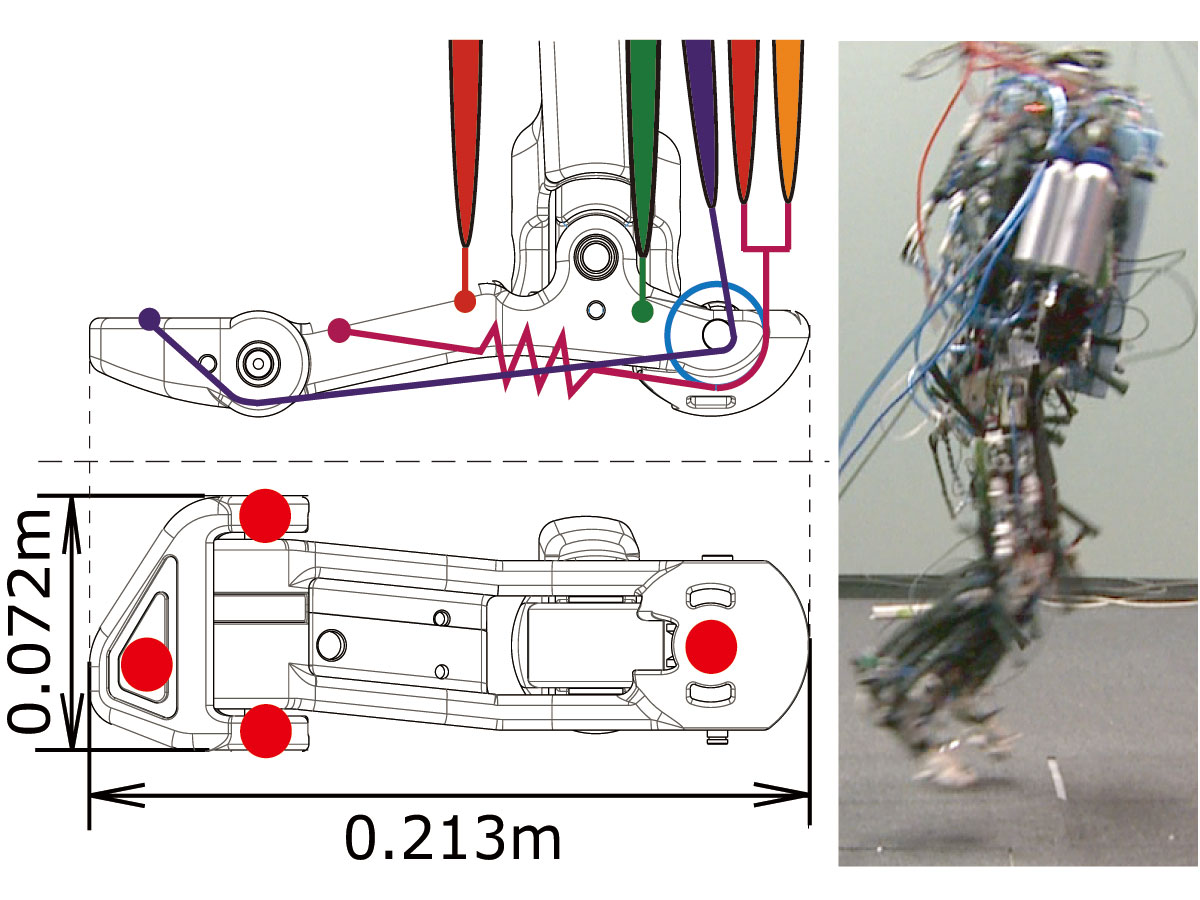
"Biomechanical Approach to Open-loop Bipedal Running with a Musculoskeletal Athlete Robot".
Ryuma Niiyama, Satoshi Nishikawa and Yasuo Kuniyoshi.
Advanced Robotics,
Vol.26, No.3, pp.383-398, 2012.
article (link) |
bibtex |
video
|
International Conferences

|
36.
"ThermoCaress: A Wearable Haptic Device with Illusory Moving Thermal Stimulation".
Yuhu Liu, Satoshi Nishikawa, Young ah Seong, Ryuma Niiyama and Yasuo Kuniyoshi.
In Proceedings of ACM Conference on Human Factors in Computing Systems (CHI 2021),
pp.1-12, Virtual, May 2021.
article (link) |
bibtex
|

|
35.
"Model-Free Reinforcement Learning with Ensemble for a Soft Continuum Robot Arm".
Ryota Morimoto, Satoshi Nishikawa, Ryuma Niiyama and Yasuo Kuniyoshi.
In Proceedings of IEEE International Conference on Soft Robotics (RoboSoft 2021),
pp.141-148, Virtual, Apr. 2021.
bibtex
|
|
34.
"Estimation of Mental Health Quality of Life using Visual Information during Interaction with a Communication Agent".
Satoshi Nakagawa, Shogo Yonekura, Hoshinori Kanazawa, Satoshi Nishikawa and Yasuo Kuniyoshi.
In Proceedings of 29th IEEE International Conference on Robot and Human Interactive Communication (Ro-Man 2020),
pp.1321-1327, Virtual, Sep. 2020.
article (link) |
bibtex
|
|
33.
"Ready Posture for Rapid Reaction of Badminton Robot Arm".
Satoshi Nishikawa, Fumiya Iida and Yasuo Kuniyoshi.
In Proceedings of International Conference on Robotics and Biomimetics (ROBIO 2019),
pp.569-574, Dali, China, Dec. 2019.
article (link) |
bibtex
|
|
32.
"High-speed flexible arm to reduce the effect of spinning ball in table tennis".
Mitsuru Takeda, Satoshi Nishikawa, Ryuma Niiyama and Yasuo Kuniyoshi.
In Proceedings of 30th International Symposium on Micro-NanoMechatronics and Human Science (MHS 2019),
Nagoya, Japan, Dec. 2019.
article (link) |
bibtex
|
|
|
31.
"Acoustic Length Sensor for Soft Extensible Pneumatic Actuators With a Frequency Characteristics Model".
Ken Takaki, Yoshitaka Taguchi, Satoshi Nishikawa, Ryuma Niiyama and Yoshihiro Kawahara.
IEEE Robotics and Automation Letters (RAL) paper presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2019),
ThCT20.1, Macau, China, Nov. 2019.
↑ Journal #7
|
|
|
30.
"High-Speed Humanoid Robot Arm for Badminton Using Pneumatic-Electric Hybrid Actuators".
Shotaro Mori, Kazutoshi Tanaka, Satoshi Nishikawa, Ryuma Niiyama and Yasuo Kuniyoshi.
IEEE Robotics and Automation Letters (RAL) paper presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2019),
ThBT13.6, Macau, China, Nov. 2019.
↑ Journal #6
|
|
29.
"Control of Pneumatic Cylinders using Iterative Linear Quadratic Regulator with Deep Local Linear Dynamics for Explosive Motions".
Yuki Nakamura, Izumi Karino, Shotaro Mori, Kazutoshi Tanaka, Satoshi Nishikawa, Ryuma Niiyama and Yasuo Kuniyoshi.
In Proceedings of the 22nd International Conference on Climbing and Walking Robots and Support Technologies for Mobile Machines (CLAWAR 2019),
pp.125-132, Kuala Lumpur, Malaysia, Aug. 2019.
article (link) |
bibtex
|
|
28.
"Dynamic Locomotion of Quadruped with Laterally Parallel Leaf Spring Spine".
Haruki Cho, Satoshi Nishikawa, Ryuma Niiyama and Yasuo Kuniyoshi.
In Proceedings of the 22nd International Conference on Climbing and Walking Robots and Support Technologies for Mobile Machines (CLAWAR 2019),
pp.91-98, Kuala Lumpur, Malaysia, Aug. 2019.
article (link) |
bibtex
|
|
27.
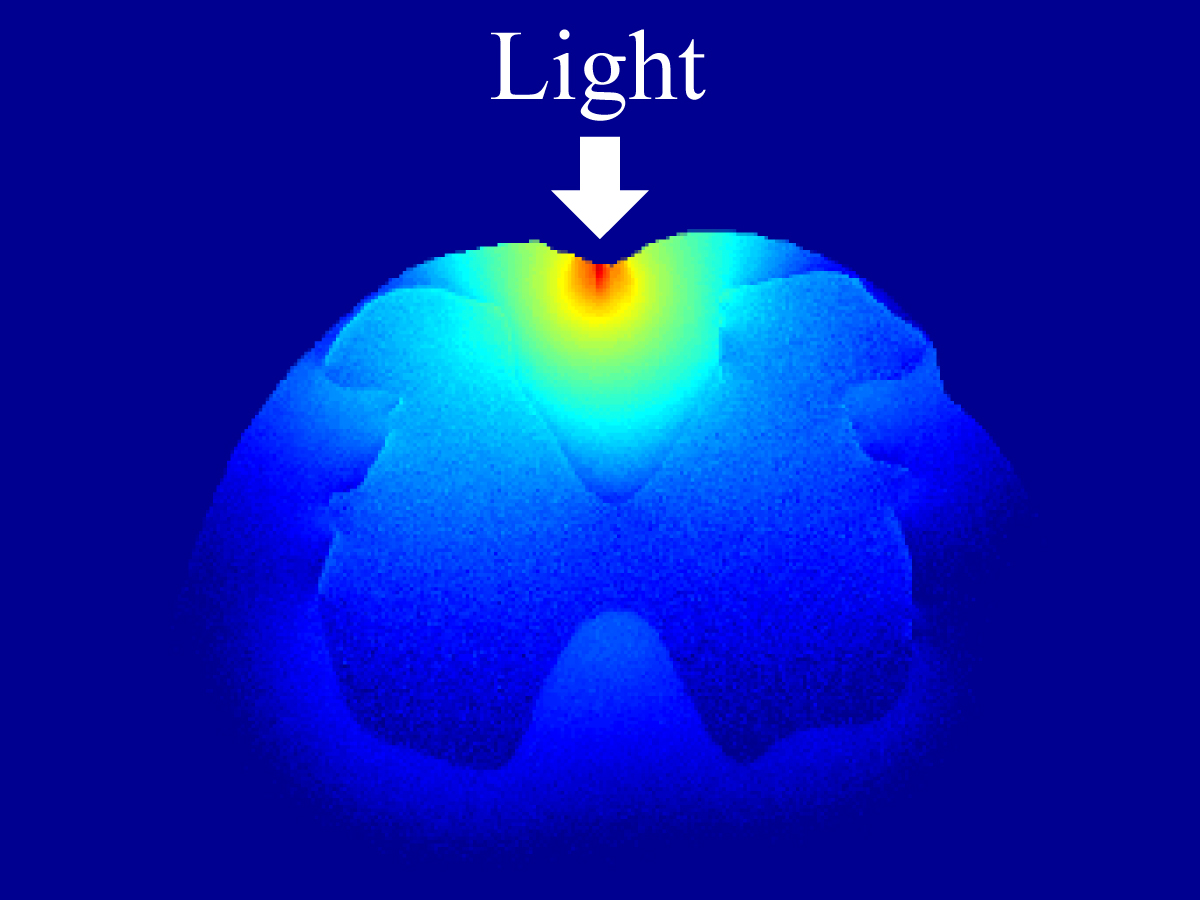
"A Simulation Study of Light Propagation in the Spinal Cord for Optogenetic Surface Stimulation".
Shih-Yin Chang, Satoshi Nishikawa, Masaki Sekino, Hiroshi Onodera and Yasuo Kuniyoshi.
In Proceedings of the 41th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC 2019),
pp.6872-6875 (SaD06.1), Berlin, Germany, Jul. 2019.
article (link) |
bibtex
|
|
26.
"Sequential Jumping-Stepping Motion on Musculoskeletal Humanoid Robot for Agile Locomotion".
Dwindra Sulistyoutomo, Satoshi Nishikawa, Ryuma Niiyama and Yasuo Kuniyoshi.
In Proceedings of IEEE International Conference on Robotics and Biomimetics (ROBIO 2018),
pp.2328-2333, Kuala Lumpur, Malaysia, Dec. 2018.
article (link) |
bibtex
|
|
25.
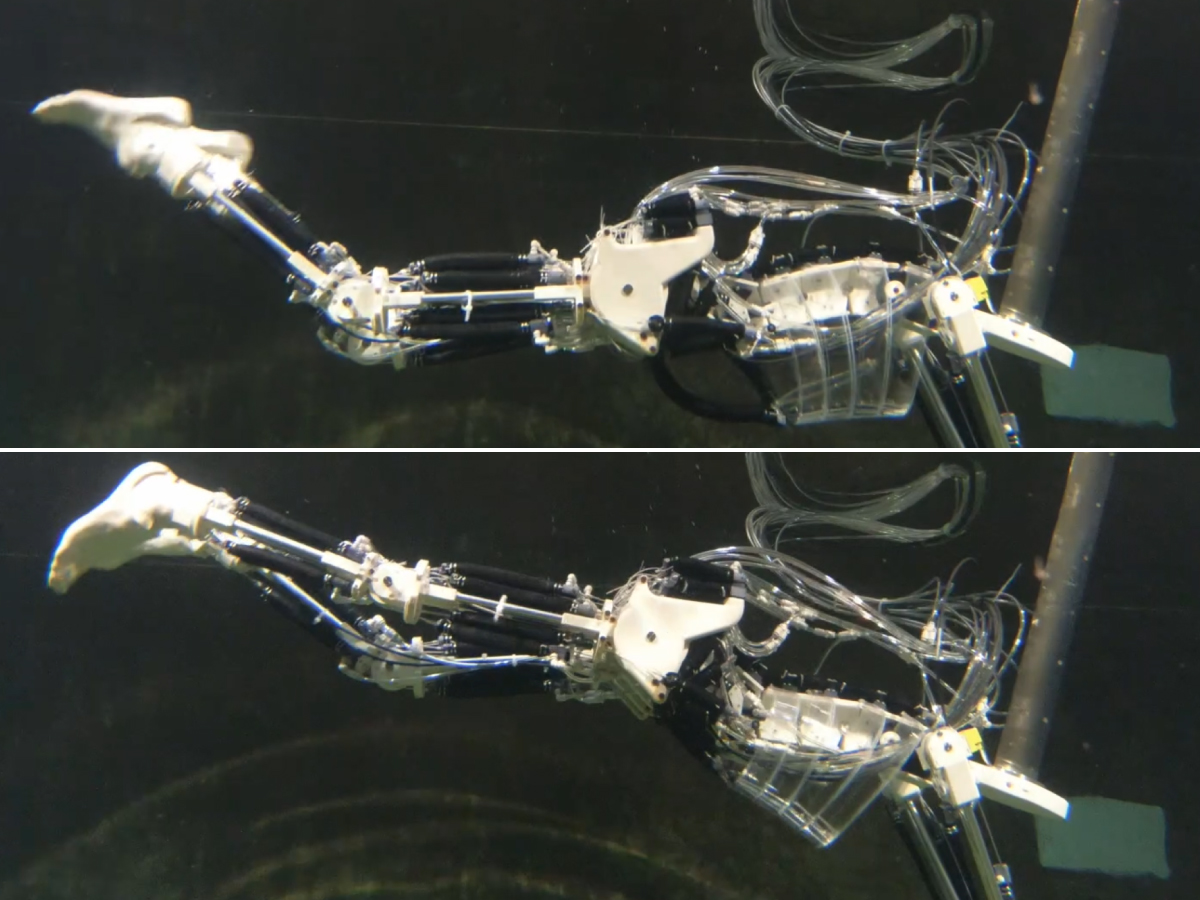
"Development of a Musculoskeletal Humanoid Robot as a Platform for Biomechanical Research on the Underwater Dolphin Kick".
Yasuaki Ishii, Satoshi Nishikawa, Ryuma Niiyama and Yasuo Kuniyoshi.
In Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018),
pp.3285-3291, Madrid, Spain, Oct. 2018.
article (link) |
bibtex |
video (UT ISI Lab)
|
|
|
24.
"Coordinated Use of Structure-integrated Bistable Actuation Modules for Agile Locomotion".
Satoshi Nishikawa, Yusuke Arai, Ryuma Niiyama and Yasuo Kuniyoshi.
IEEE Robotics and Automation Letters (RAL) paper presented at the 2018 IEEE International Conference on Robotics and Automation (ICRA 2018),
WeP@F.5, Brisbane, Australia, May 2018.
↑ Journal #3
|
|
|
23.
"High-speed and Lightweight Humanoid Robot Arm for a Skillful Badminton Robot".
Shotaro Mori, Kazutoshi Tanaka, Satoshi Nishikawa, Ryuma Niiyama and Yasuo Kuniyoshi.
IEEE Robotics and Automation Letters (RAL) paper presented at the 2018 IEEE International Conference on Robotics and Automation (ICRA 2018),
TuA@N.1, Brisbane, Australia, May 2018.
↑ Journal #4
|
|
22.
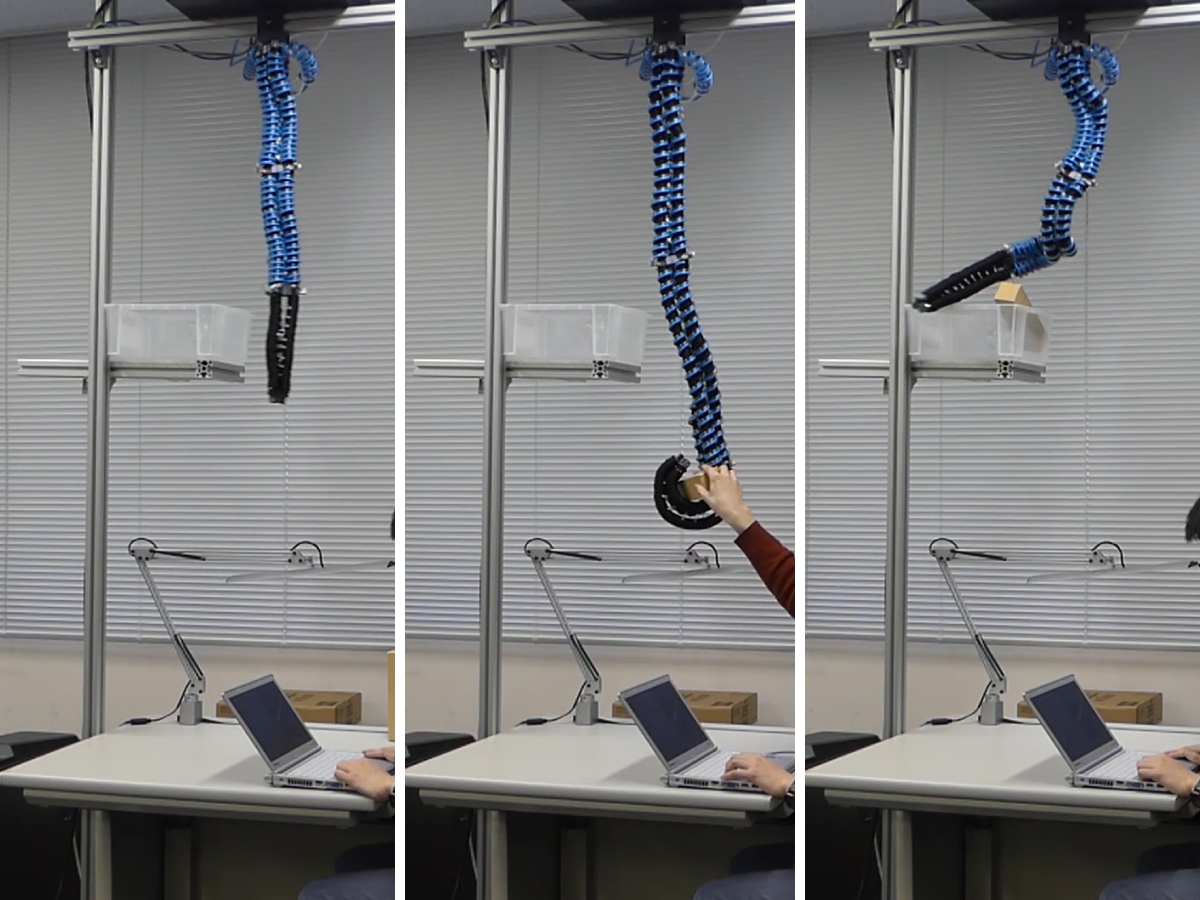
"Ceiling Continuum Arm with Extensible Pneumatic Actuators for Desktop Workspace".
Taigo Yukisawa, Satoshi Nishikawa, Ryuma Niiyama, Yoshihiro Kawahara and Yasuo Kuniyoshi.
In Proceedings of IEEE International Conference on Soft Robotics (RoboSoft 2018),
pp.196-201 (WeTT.24), Livorno, Italy, Apr. 2018.
article (link) |
bibtex
|
|
21.
"Bilateral Teleoperation System for a Musculoskeletal Robot Arm using a Musculoskeletal Exoskeleton".
Xi Chen, Satoshi Nishikawa, Kazutoshi Tanaka, Ryuma Niiyama and Yasuo Kuniyoshi.
In Proceedings of IEEE International Conference on Robotics and Biomimetics (ROBIO 2017),
pp.2734-2739, Macau, China, Dec. 2017.
article (link) |
bibtex
|
|
20.
"Modeling of Extensible Pneumatic Actuator with Bellows (EPAB) for Continuum Arm".
Taigo Yukisawa, Yasuaki Ishii, Satoshi Nishikawa, Ryuma Niiyama and Yasuo Kuniyoshi.
In Proceedings of IEEE International Conference on Robotics and Biomimetics (ROBIO 2017),
pp.2303-2308, Macau, China, Dec. 2017.
article (link) |
bibtex
|
|
19.
"Humanoid robot performing jump-and-hit motions using structure-integrated pneumatic cable cylinders".
Kazutoshi Tanaka, Satoshi Nishikawa, Ryuma Niiyama and Yasuo Kuniyoshi.
In Proceedings of IEEE-RAS International Conference on Humanoid Robots (Humanoids 2017),
pp.696-702, Birmingham, UK, Nov. 2017.
article (link) |
bibtex |
video (UT ISI Lab)
|
|
18.
"Environmental and Structural Effects on Physical Reservoir Computing with Tensegrity".
Kenichi Fujita, Syogo Yonekura, Satoshi Nishikawa, Ryuma Niiyama and Yasuo Kuniyoshi.
In Proceedings of the 5th IIAE International Conference on Intelligent Systems and Image Processing (ICISIP 2017),
pp.197-204, Waikiki, Hawaii, USA, Sep. 2017.
article (link) |
bibtex
|
|
17.
"Compliant Jumping Mechanism with Bi-stable Structure".
Yusuke Arai, Satoshi Nishikawa, Ryuma Niiyama and Yasuo Kuniyoshi.
In Proceedings of the International Conference on Robotics and Automation (ICRA 2017) Workshop on Advanced Fabrication and Morphological Computation for Soft Robotics,
Singapore, May 2017.
book of abstract (link) |
bibtex
|

|
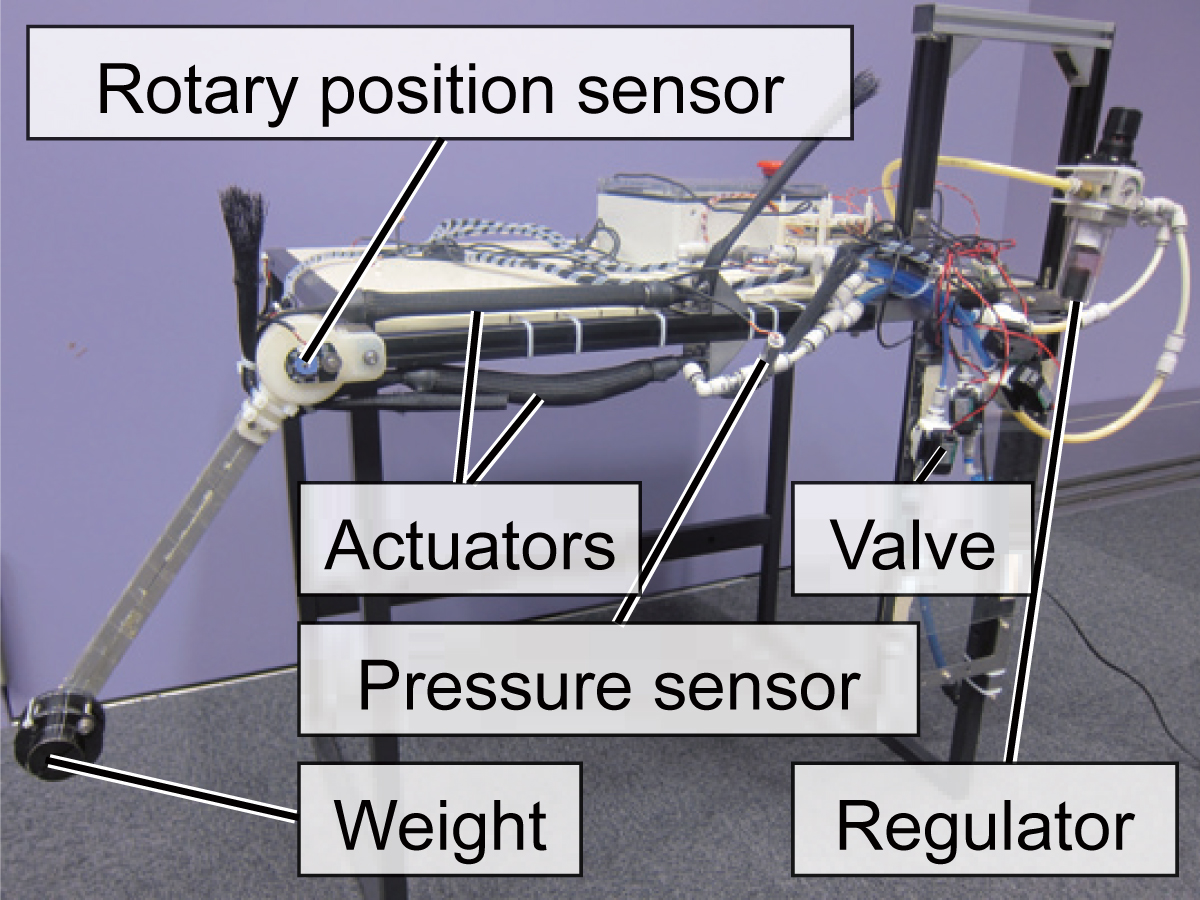
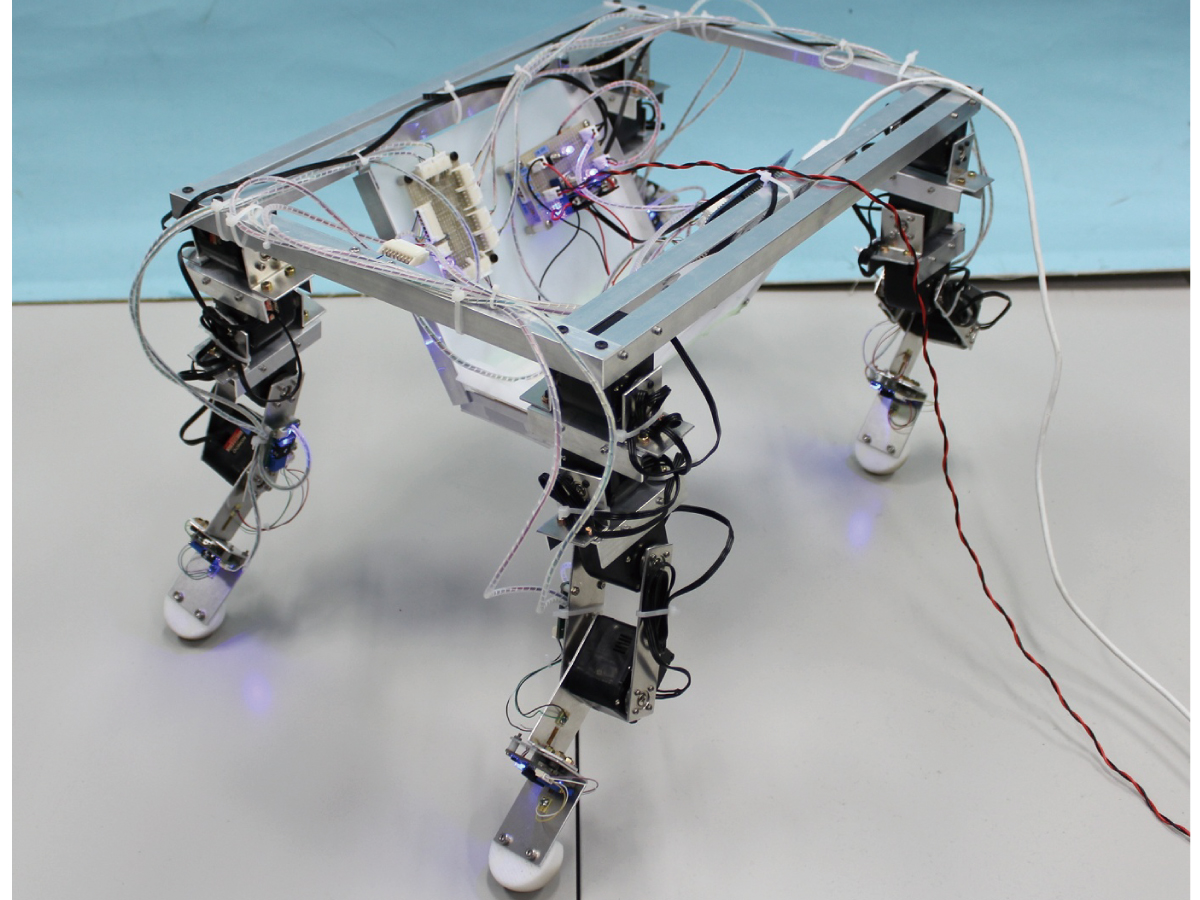
16.
"Musculoskeletal Quadruped Robot with Torque-Angle Relationship Control System".
Satoshi Nishikawa, Kazuya Shida and Yasuo Kuniyoshi.
In Proceedings of the International Conference on Robotics and Automation (ICRA 2016),
pp.4044-4050, Stockholm, Sweden, May 2016.
article (link) |
bibtex
|

|
15.
"Pole Vaulting Robot with Dual Articulated Arms that can Change Reaching Position Using Active Bending Motion".
Satoshi Nishikawa, Tomohiro Kobayashi, Toshihiko Fukushima and Yasuo Kuniyoshi.
In Proceedings of the 15th International Conference on Humanoid Robots (Humanoids 2015),
pp.395-400, Seoul, Korea, Nov. 2015.
article (link) |
bibtex
|
|
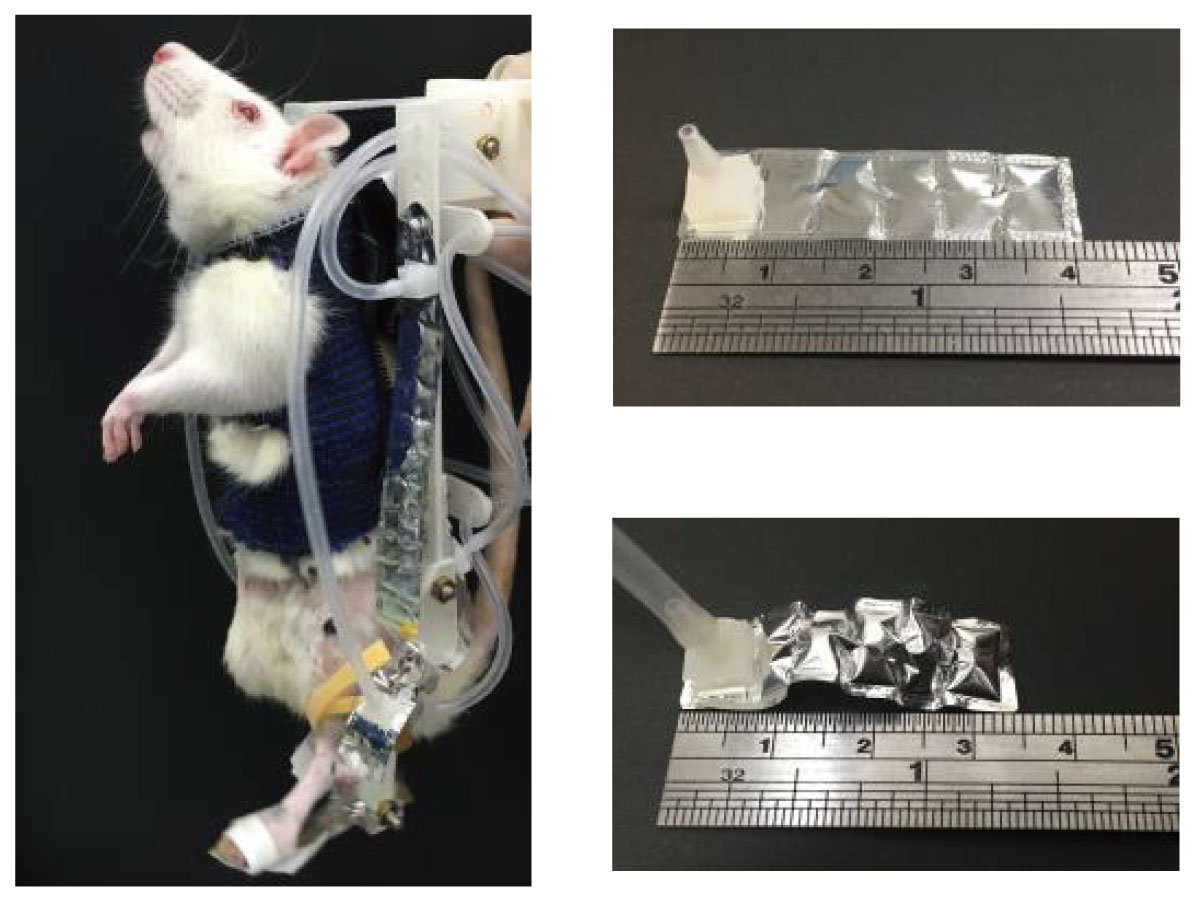
14.
"Design of Small-size Pouch Motors for Rat Gait Rehabilitation Device".
Shih-Yin Chang, Kenta Takashima, Satoshi Nishikawa, Ryuma Niiyama, Takao Someya, Hiroshi Onodera and Yasuo Kuniyoshi.
In Proceedings of the 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC 2015),
pp.4578-4581 (ThFPoT12.8), Milano, Italy, Aug. 2015.
article (link) |
bibtex
|
|
13.
"Adjustment of Pressure in Antagonistic Joints with Pneumatic Artificial Muscles for Rapid Reacting Motions".
Kazutoshi Tanaka, Satoshi Nishikawa and Yasuo Kuniyoshi.
In Proceedings of the 17th International Conference on Climbing and Walking Robots (CLAWAR 2014),
pp.183-190, Poznan, Poland, Jul. 2014.
book (link) |
bibtex
|

|
12.
"Active Bending Motion of Pole Vault Robot to Improve Reachable Height".
Toshihiko Fukushima, Satoshi Nishikawa and Yasuo Kuniyoshi.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2014),
pp.4208-4214 (TuD13.2), Hong-Kong, China, Jun. 2014.
article (link) |
bibtex
|
|
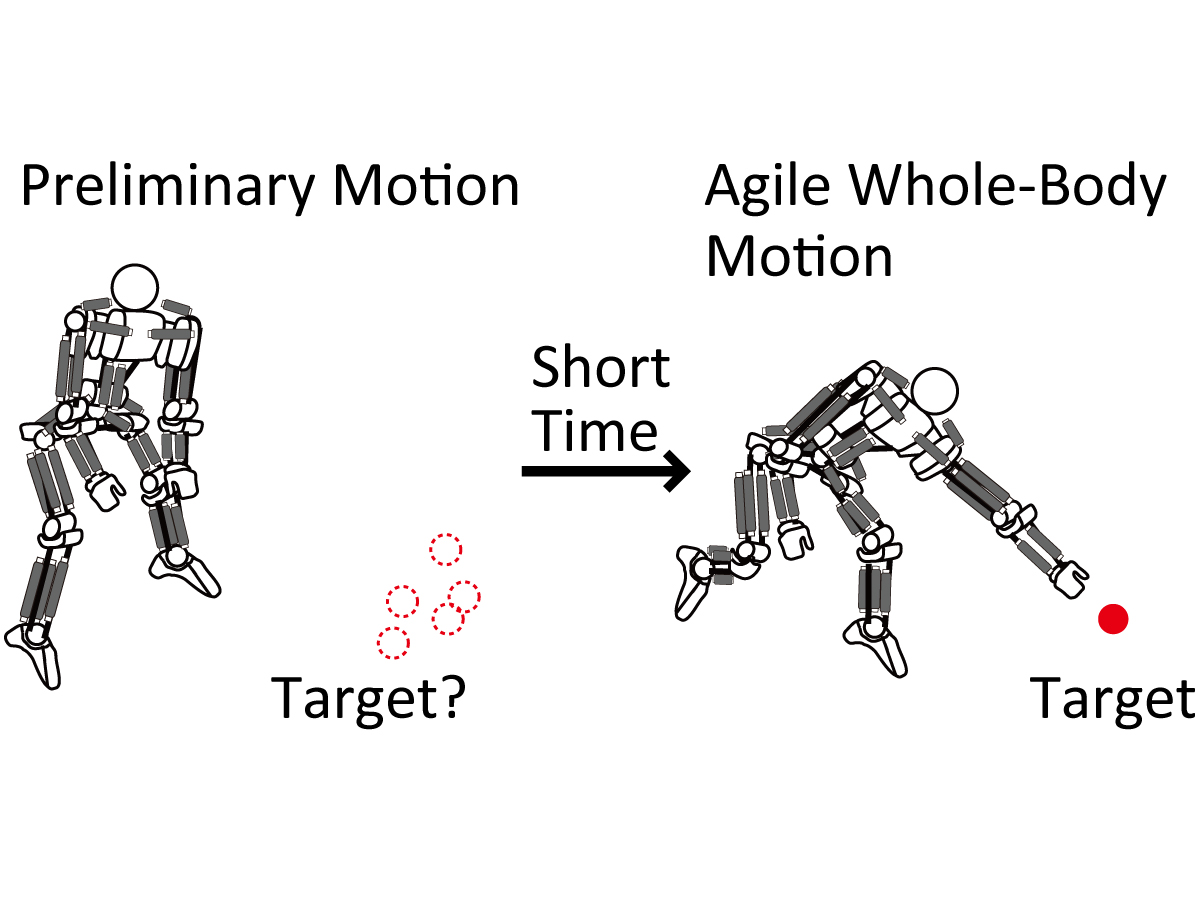
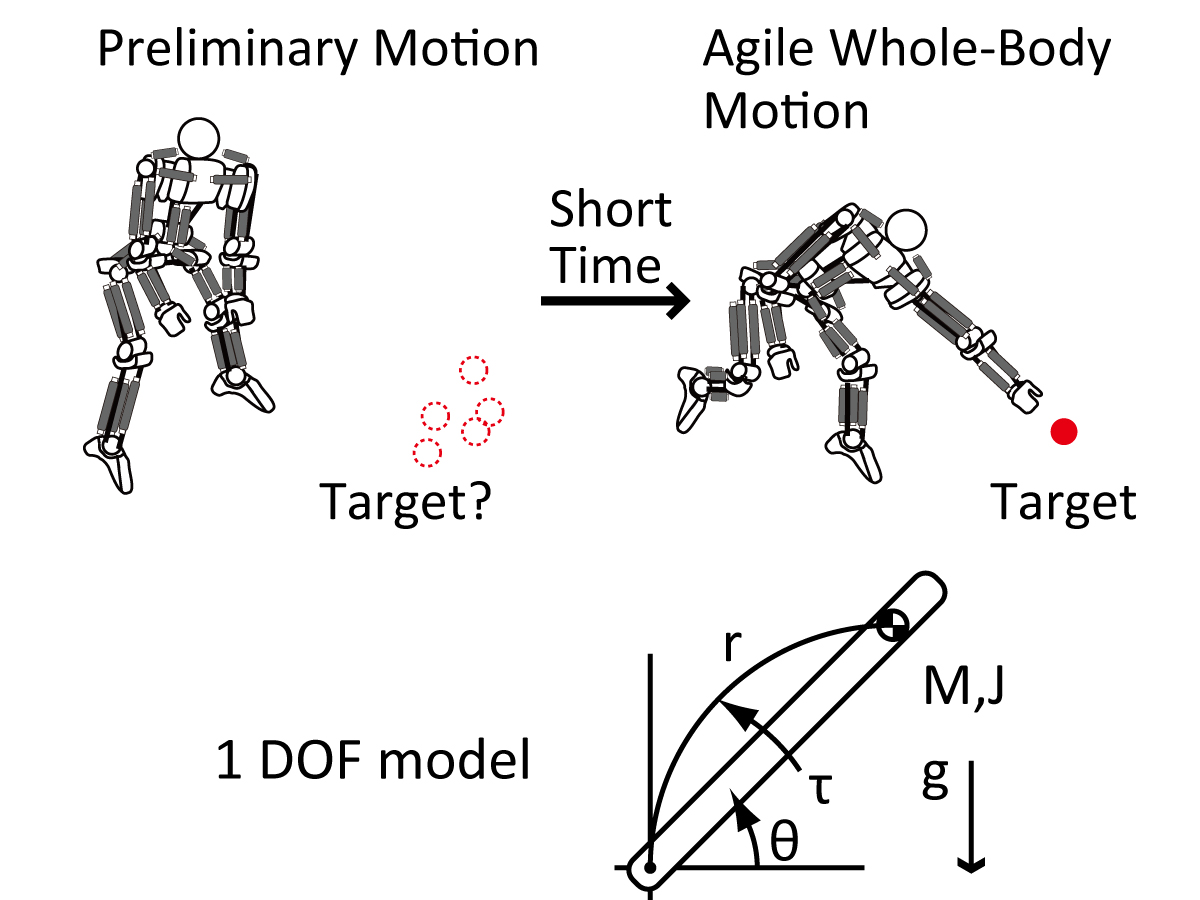
11.
"Effect of Preliminary Motions on Agile Motions".
Kazutoshi Tanaka, Satoshi Nishikawa and Yasuo Kuniyoshi.
In Proceedings of the 16th International Conference on Advanced Robotics (ICAR 2013),
Montevideo, Uruguay, Nov. 2013.
article (link) |
bibtex
|
|
10.
"Effective Timing of Swing-Up Motion by a Pole-Vaulting Robot".
Satoshi Nishikawa, Toshihiko Fukushima and Yasuo Kuniyoshi.
In Proceedings of the 16th International Conference on Advanced Robotics (ICAR 2013),
Montevideo, Uruguay, Nov. 2013.
article (link) |
bibtex
|
|
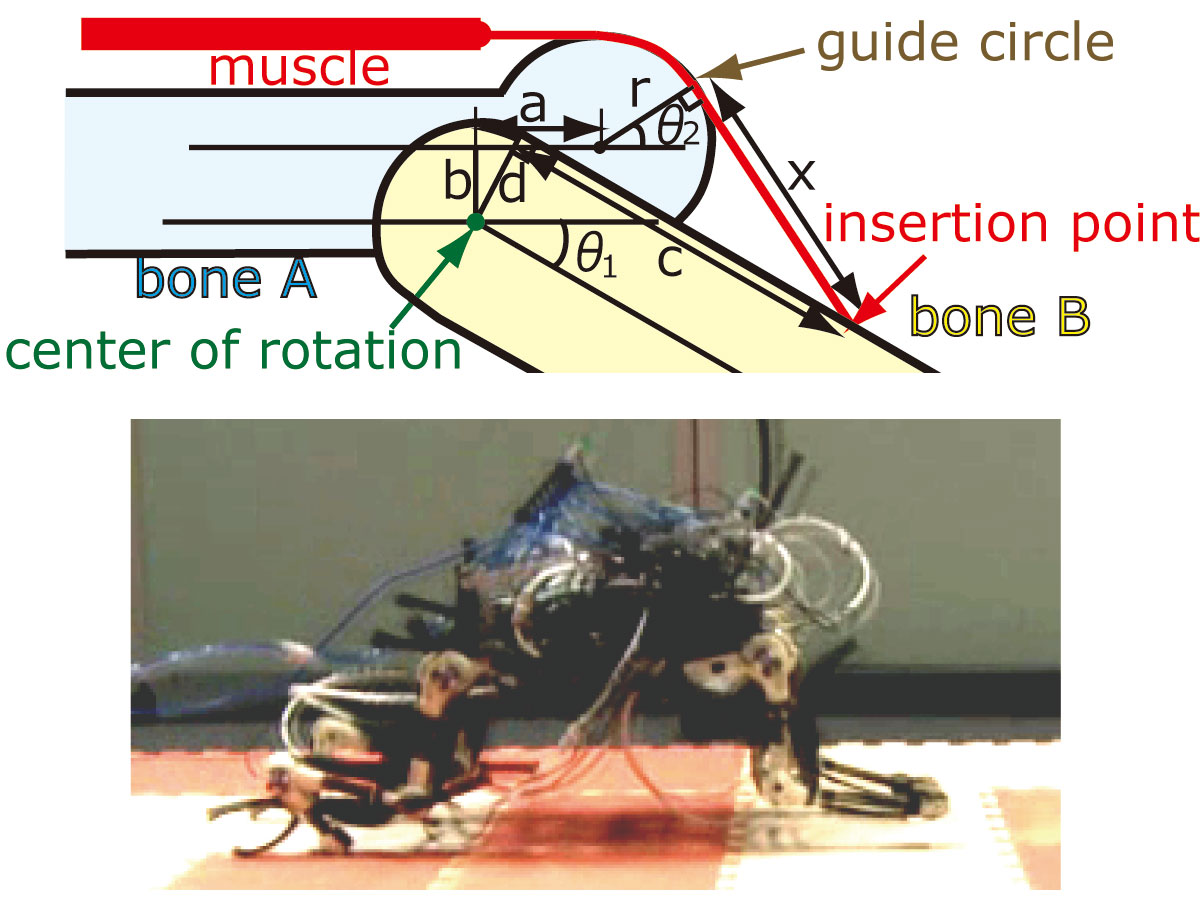
9.
"Improvement of Energy Consumption by Movement of Center of Rotation of Joint".
Kazutoshi Tanaka, Satoshi Nishikawa and Yasuo Kuniyoshi.
In Proceedings of the 16th International Conference on Climbing and Walking Robots (CLAWAR 2013),
p.273-280, Sydney, Australia, Jul. 2013.
book (link) |
bibtex
|

|
8.
"Design and Test of Torque-Angle Relationship Control System".
Kazuya Shida, Satoshi Nishikawa and Yasuo Kuniyoshi.
In Proceedings of the 6th International Symposium on Adaptive Motion of Animals and Machines (AMAM 2013),
P-30, Darmstadt, Germany, Mar. 2013.
proceedings (link) |
bibtex
|
|
7.
"Angle-Dependent Moment Arm with Biased Pivot for Jumping from Various Squatting Positions".
Satoshi Nishikawa, Kazutoshi Tanaka, Kazuya Shida,
Ryuma Niiyama and Yasuo Kuniyoshi.
In Proceedings of the 6th International Symposium on Adaptive Motion of Animals and Machines (AMAM 2013),
P-24, Darmstadt, Germany, Mar. 2013.
proceedings (link) |
bibtex
|
|
6.
"Transitional Buckling Model for Active Bending Effect in Pole Vault".
Toshihiko Fukushima, Satoshi Nishikawa, Kazutoshi Tanaka and Yasuo Kuniyoshi.
In Proceedings of the 6th International Symposium on Adaptive Motion of Animals and Machines (AMAM 2013),
P-8, Darmstadt, Germany, Mar. 2013.
proceedings (link) |
bibtex
|
|
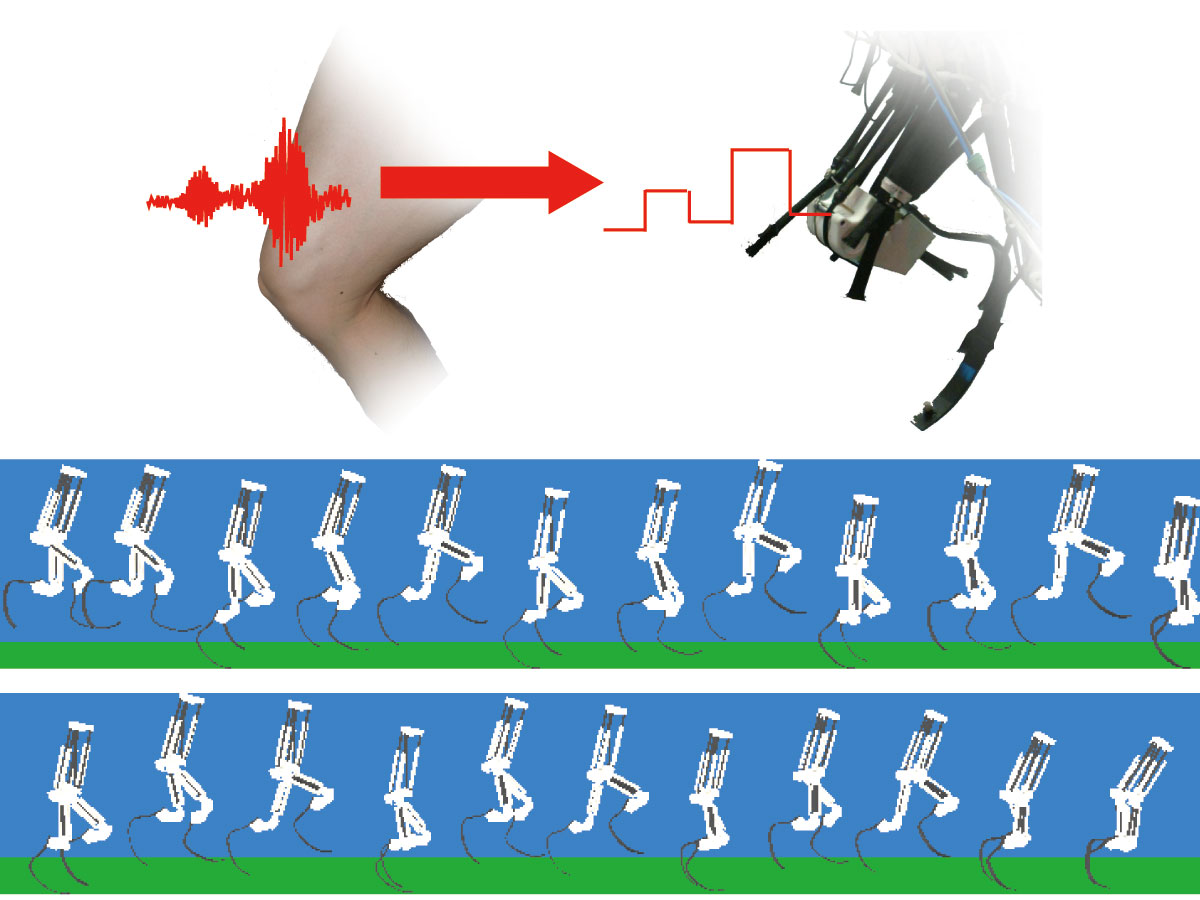
5.
"Running Motion in a Musculoskeletal Bipedal Robot using Muscle Activation Pattern Control Based on a Human Electromyogram".
Satoshi Nishikawa,
Ryuma Niiyama and Yasuo Kuniyoshi.
In Proceedings of the 5th International Symposium on Adaptive Motion of Animals and Machines (AMAM 2011),
pp.15-16, Hyogo, Japan, Oct. 2011.
pdf (link) |
bibtex
|

|
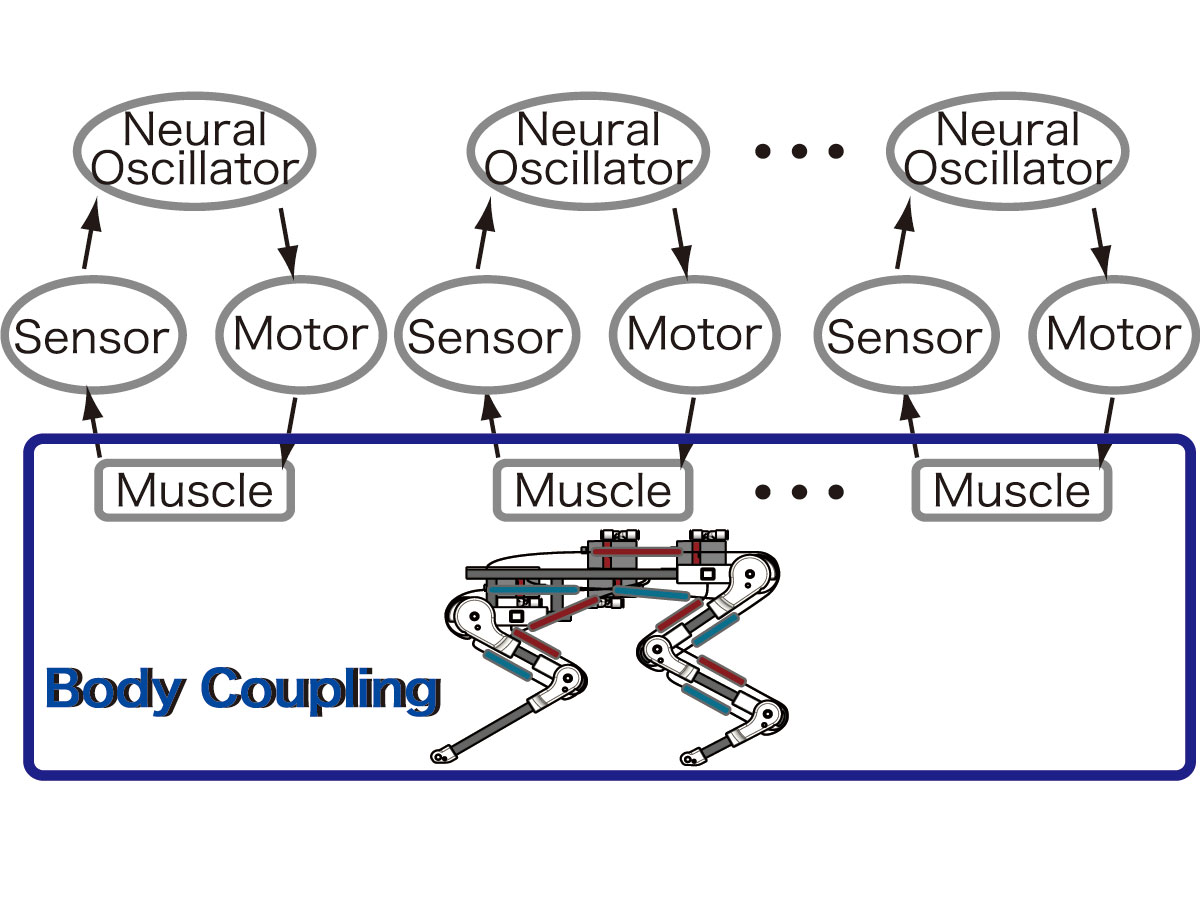
4.
"Neural-Body Coupling for Emergent Locomotion: a Musculoskeletal Quadruped Robot with Spinobulbar Model".
Yasunori Yamada, Satoshi Nishikawa, Kazuya Shida,
Ryuma Niiyama and Yasuo Kuniyoshi.
In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2011),
pp.1499-1506 (TuBT8.7), San Francisco CA, USA, Sept. 2011.
article (link) |
bibtex
|
|
3.
"Emergent Locomotion Patterns from a Quadruped Pneumatic Musculoskeletal Robot with Spinobulbar Model".
Yasunori Yamada, Satoshi Nishikawa, Kazuya Shida and Yasuo Kuniyoshi.
International workshop on bio-inspired robots,
P-48, Nantes, France, Apr. 2011.
article (link) |
bibtex
|
|
2.
"Dynamic Motions by a Quadruped Musculoskeletal Robot with Angle-Dependent Moment Arms".
Satoshi Nishikawa,
Yasunori Yamada, Kazuya Shida and Yasuo Kuniyoshi.
International workshop on bio-inspired robots,
P-47, Nantes, France, Apr. 2011.
article (link) |
bibtex
|
|
1.
"Athlete Robot with Applied Human Muscle Activation Patterns for Bipedal Running".
Ryuma Niiyama, Satoshi Nishikawa and Yasuo Kuniyoshi.
In Proceedings of the IEEE-RAS International Conference on Humanoid Robots (Humanoids 2010),
pp.498-503, Nashville TN, USA, Dec. 2010.
article (link) |
bibtex
|
Domestic Conferences (in Japanese) (国内会議)

|
33.
"Physical Reservoir Computingを用いたやわらかいシート状遊泳ロボットの動作生成".
("Motion generation of a Soft Sheet-like Swimming Robot using Physical Reservoir Computing".)
堀井雄太, 井上克馬, 西川鋭, 中嶋浩平, 新山龍馬, 國吉康夫.
(Yuta Horii, Katsuma Inoue, Satoshi Nishikawa, Kohei Nakajima,
Ryuma Niiyama and Yasuo Kuniyoshi.)
日本機械学会 ロボティクス・メカトロニクス講演会2021 (Robomech2021),
2P2-G16, Online, May 2021.
|

|
32.
"AdaBoostを用いた心の健康スコア推定システムの構築".
("Mental Health Score Estimation System Based on AdaBoost".)
中川聡, 米倉将吾, 金沢星慶, 西川鋭, 國吉康夫.
(Satoshi Nakagawa, Shogo Yonekura, Hoshinori Kanazawa, Satoshi Nishikawa and Yasuo Kuniyoshi.)
第19回情報科学技術フォーラム (FIT2020),
CJ-002, Online, Sep. 2020.
article (link) |
bibtex
|

|
31.
"QOL Estimation based on Multimodal Learning through Interaction with a Communication Agent".
Satoshi Nakagawa, Shogo Yonekura, Hoshinori Kanazawa, Satoshi Nishikawa and Yasuo Kuniyoshi.
2020年度人工知能学会全国大会 国際セッション (JSAI2020),
2G6-ES-3-03, Online, Jun. 2020.
article (link) |
bibtex
|
|
30.
"運動プリミティブを用いた強化学習による空気圧連続アームの投擲運動".
("Throwing a Ball of the Pneumatically-Controlled Continuum Robot Armusing Reinforcement Learning with Movement Primitives".)
森本亮太, 西川鋭, 新山龍馬, 國吉康夫.
(Ryota Morimoto, Satoshi Nishikawa,
Ryuma Niiyama and Yasuo Kuniyoshi.)
日本機械学会 ロボティクス・メカトロニクス講演会2020 (Robomech2020),
1P2-J05, Online, May 2020.
article (link) |
bibtex
|
|
29.
"予測を利用した強化学習エージェントによる競技型接触インタラクション".
("Competitive physical interaction by reinforcement learning agents using predictive models".)
野田裕貴, 西川鋭, 新山龍馬, 國吉康夫.
(Hiroki Noda, Satoshi Nishikawa,
Ryuma Niiyama and Yasuo Kuniyoshi.)
日本機械学会 ロボティクス・メカトロニクス講演会2020 (Robomech2020),
1P1-G06, Online, May 2020.
article (link) |
bibtex
|
|
28.
"ダイナミックな脚式ロボットのための吸着機構活用法の検討".
西川鋭, 國吉康夫.
第37回 日本ロボット学会学術講演会 (RSJ2019),
1J3-01, 東京都新宿区, Sep. 2019.
bibtex
|
|
27.
"しなりを活用した高速な卓球スイングアームによるボールの回転の影響の低減".
("Reduction of the Effect of Spinning Ball in Table Tennis by High Speed Swinging using Flexible Arm".)
竹田恭, 西川鋭, 新山龍馬, 國吉康夫.
(Mitsuru Takeda, Satoshi Nishikawa,
Ryuma Niiyama and Yasuo Kuniyoshi.)
日本機械学会 ロボティクス・メカトロニクス講演会2019 (Robomech2019),
1P2-F09, 広島県広島市, Jun. 2019.
article (link) |
bibtex
|

|
26.
"ドルフィンキック研究のための空気圧駆動筋骨格ヒューマノイドの開発".
("Development of pneumatically actuated musuculoskeletal humanoid for dolphin kick research".)
石井康彬, 西川鋭, 新山龍馬, 國吉康夫.
(Yasuaki Ishii, Satoshi Nishikawa,
Ryuma Niiyama and Yasuo Kuniyoshi.)
日本機械学会 ロボティクス・メカトロニクス講演会2018 (Robomech2018),
2P2-F09, 福岡県北九州市, Jun. 2018.
article (link) |
bibtex
|
|
25.
"空気圧ヒト型ロボットによる生成モデルを用いた即応的な跳躍打撃動作の生成法".
田中一敏, 西川鋭, 新山龍馬, 國吉康夫.
(Kazutoshi Tanaka, Satoshi Nishikawa,
Ryuma Niiyama and Yasuo Kuniyoshi.)
第35回 日本ロボット学会学術講演会 (RSJ2017),
2L1-02, 埼玉県川越市, Sep. 2017.
abstract (link) |
bibtex
|
|
24.
"バドミントンのための高加速・高速な手首を有する人型ロボットアームの開発".
("Humanoid robot arm for badminton with high accelerration and high speed wrist".)
森翔太郎, 田中一敏, 西川鋭, 新山龍馬, 國吉康夫.
(Shotaro Mori, Kazutoshi Tanaka, Satoshi Nishikawa,
Ryuma Niiyama and Yasuo Kuniyoshi.)
日本機械学会 ロボティクス・メカトロニクス講演会2017 (Robomech2017),
2A2-E04, 福島県郡山市, May 2017.
article (link) |
bibtex
|
|
23.
"跳躍打撃動作を行う構造一体型空気圧ケーブルシリンダロボットの開発".
("Development of a structure integrated pneumatic cable cylinder robot executing a jump-hit motion".)
田中一敏, 西川鋭, 陳熙, 新山龍馬, 國吉康夫.
(Kazutoshi Tanaka, Satoshi Nishikawa, Xi Chen,
Ryuma Niiyama and Yasuo Kuniyoshi.)
日本機械学会 ロボティクス・メカトロニクス講演会2017 (Robomech2017),
2A2-E03, 福島県郡山市, May 2017.
article (link) |
bibtex
|
|
22.
"身体構造のダイナミクスを利用したReservoir Computingに関する研究".
("Reservoir Computing with Body Structures and Dynamics".)
藤田健一, 米倉将吾, 西川鋭, 新山龍馬, 國吉康夫.
(Kenichi Fujita, Shogo Yonekura, Satoshi Nishikawa,
Ryuma Niiyama and Yasuo Kuniyoshi.)
日本機械学会 ロボティクス・メカトロニクス講演会2017 (Robomech2017),
1P2-N11, 福島県郡山市, May 2017.
article (link) |
bibtex
|
|
21.
"回転跳躍ロコモーションを行なうハンドスプリングロボットの制御".
("Control of the handspring robot with rolling-jumping locomotion".)
長晴紀, 西川鋭, 新山龍馬, 國吉康夫.
(Haruki Cho, Satoshi Nishikawa,
Ryuma Niiyama and Yasuo Kuniyoshi.)
日本機械学会 ロボティクス・メカトロニクス講演会2017 (Robomech2017),
1P1-B11, 福島県郡山市, May 2017.
article (link) |
bibtex
|

|
20.
"筋骨格ロボットの運動学習のためのHuman-in-the-loop教師あり学習システム".
("Human-in-the-Loop System for Teaching Motion of Musculoskeletal Robot".)
陳熙, 田中一敏, 西川鋭, 新山龍馬, 國吉康夫.
(Xi Chen, Kazutoshi Tanaka, Satoshi Nishikawa,
Ryuma Niiyama and Yasuo Kuniyoshi.)
第17回 計測自動制御学会システムインテグレーション部門講演会 (SI2016),
3E2-4, 北海道札幌市, Dec. 2016.
bibtex
|

|
19.
"Bistable構造を用いた変形モジュールロボットによるダイナミックな運動の生成".
("Dynamic Motion Generation of Deformable Modular Robot Using Bistable Structure".)
新井悠介, 西川鋭, 新山龍馬, 國吉康夫.
(Yusuke Arai, Satoshi Nishikawa,
Ryuma Niiyama and Yasuo Kuniyoshi.)
第17回 計測自動制御学会システムインテグレーション部門講演会 (SI2016),
3C1-4, 北海道札幌市, Dec. 2016.
bibtex
|

|
18.
"ポール局所曲げ動作により跳躍方向を調節する双腕棒高跳びロボット".
西川鋭, 小林智裕, 福島俊彦, 國吉康夫.
第33回 日本ロボット学会学術講演会 (RSJ2015),
1A1-02, 東京都足立区, Sept. 2015.
bibtex
|
|
17.
"立位での巧緻動作における支持腕の肩外転角度が手先の停止安定性に与える影響".
西川鋭, 田中一敏, 國吉康夫.
(Satoshi Nishikawa, Kazutoshi Tanaka and Yasuo Kuniyoshi.)
第23回日本バイオメカニクス学会大会 (JSB2014),
O2-A4, 東京都北区, Sep. 2014.
bibtex
|
|
16.
"準備局面の拮抗的筋活動が踏み出しリーチングに与える効果".
田中一敏, 西川鋭, 國吉康夫.
(Kazutoshi Tanaka, Satoshi Nishikawa and Yasuo Kuniyoshi.)
第32回日本ロボット学会学術講演会 (RSJ2014),
3B1-02 , 福岡県福岡市, Sep. 2014.
bibtex
|
|
15.
"確率的目標状態への遷移時間を最小化する準備動作".
("Preliminary motions for minimizing transition time to probabilistically-variable target states".)
田中一敏, 西川鋭, 國吉康夫.
(Kazutoshi Tanaka, Satoshi Nishikawa and Yasuo Kuniyoshi.)
日本機械学会 ロボティクス・メカトロニクス講演会2014 (Robomech2014),
1P1-P03, 富山県富山市, May 2014.
article (link) |
bibtex
|
|
14.
"二関節バネダンパ機構が外乱下の棒高跳びに与える効果".
("Effect of Bi-articular Spring-damper System on Disturbed Pole Vault".)
西川鋭,
福島俊彦, 國吉康夫.
(Satoshi Nishikawa,
Toshihiko Fukushima and Yasuo Kuniyoshi.)
日本機械学会 ロボティクス・メカトロニクス講演会2014 (Robomech2014),
1A1-A08, 富山県富山市, May 2014.
article (link) |
bibtex
|
|
13.
"若手研究者によるブレインストーミングと実践から垣間見る表面筋電信号計測・解析システムの応用可能性 -第19回創発システムシンポジウムワークショップにおける成果-".
("Application Potentiality of an EMG Measurement & Analysis System Created through Young Researchers' Brainstorming and Practice - A Report of Workshop on the 19th Emergent System Symposium -".)
松下光次郎,
成岡健一, 西川鋭,
築地原里樹,
安部祐一,
安琪,
大脇大.
(Kojiro Matsushita,
Kenichi Narioka, Satoshi Nishikawa,
Satoki Tsuichihara,
Yuichi Anbe,
Qi An and
Dai Owaki.)
計測自動制御学会 システム・情報部門学術講演会2013 (SSI2013),
SS5-9, 滋賀県大津市, Nov. 2013.
bibtex
|
|
12.
"棒高跳びにおける跳躍パフォーマンス向上のための溜め動作".
("Resisting motion to improve vaulting performance in pole vault".)
西川鋭,
福島俊彦, 國吉康夫.
(Satoshi Nishikawa,
Toshihiko Fukushima and Yasuo Kuniyoshi.)
第7回 Motor Control 研究会 (MC2013),
B-40, 東京都文京区, Sept. 2013.
bibtex
|
|
11.
"ポール曲げ効果から観る棒高跳びにおける身体-ポール協調動作".
("Body-Pole Coordinated Motion from the Pole Bending Perspective in Pole Vault".)
福島俊彦, 西川鋭, 國吉康夫.
(Toshihiko Fukushima, Satoshi Nishikawa and Yasuo Kuniyoshi.)
第7回 Motor Control 研究会 (MC2013),
A-15, 東京都文京区, Sept. 2013.
bibtex
|
|
10.
"敏捷動作に先立つ構えの効果検討".
田中一敏, 西川鋭, 國吉康夫.
第31回 日本ロボット学会学術講演会,
3K3-02, 東京都八王子市, Sept. 2013.
bibtex
|
|
9.
"CPGの調整により故障時の身体の物理的変化に即応する四足歩行ロボットの開発".
三浦拳, 西川鋭, 國吉康夫.
第31回 日本ロボット学会学術講演会,
2N2-02, 東京都八王子市, Sept. 2013.
bibtex
|
|
8.
"棒高跳びロボットのポール曲げ動作による跳躍高さ向上".
福島俊彦, 西川鋭, 國吉康夫.
第31回 日本ロボット学会学術講演会,
2F2-08, 東京都八王子市, Sept. 2013.
bibtex
|
|
7.
"棒高跳びにおけるスイング動作タイミングがポールの挙動に与える効果のロボットによる検討".
西川鋭, 福島俊彦, 國吉康夫.
第31回 日本ロボット学会学術講演会,
2G1-04, 東京都八王子市, Sept. 2013.
bibtex
|
|
6.
"可変な関節トルク分配比を備えた筋骨格四脚ロボット".
("Musculoskeletal Quadrupedal Robot with Variable Distribution Ratio of Joint Torque".)
西川鋭, 志田和也, 國吉康夫.
(Satoshi Nishikawa, Kazuya Shida and Yasuo Kuniyoshi.)
第19回 創発システムシンポジウム,
P15, 大阪府大阪市, Aug. 2013.
bibtex
|

|
5.
"敏捷動作生成に先立つ構え生成手法の検証".
田中一敏, 西川鋭, 國吉康夫.
(Kazutoshi Tanaka, Satoshi Nishikawa and Yasuo Kuniyoshi.)
第19回 創発システムシンポジウム,
P9, 大阪府大阪市, Aug. 2013.
bibtex
|
|
4.
"筋骨格系駆動のヒト規範足部を備えたロボットによる跳躍".
西川鋭, 志田和也,
新山龍馬, 國吉康夫.
(Satoshi Nishikawa, Kazuya Shida,
Ryuma Niiyama and Yasuo Kuniyoshi.)
第30回 日本ロボット学会学術講演会,
2C2-3, 北海道札幌市, Sept. 2012.
bibtex
|
|
3.
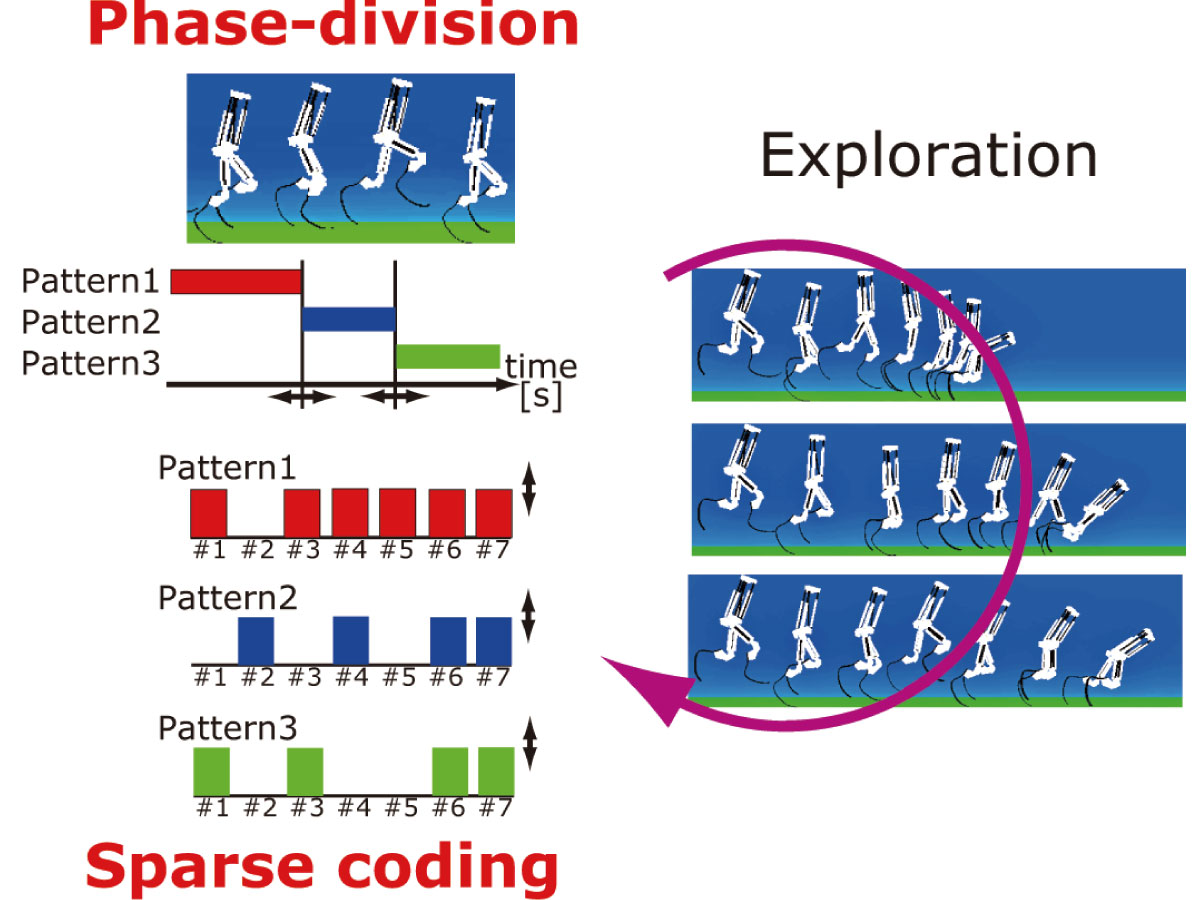
"少数筋群からなるフェーズ分けによる運動学習".
("Motor Learning by Phase Division with Sparse Coding of Muscle Activation".)
西川鋭,
新山龍馬, 國吉康夫.
(Satoshi Nishikawa,
Ryuma Niiyama and Yasuo Kuniyoshi.)
第6回 Motor Control 研究会 (MC2012),
P-34, 愛知県岡崎市, Jun. 2012.
abstract (link) |
bibtex
|
|
|
2.
"床反力制御による筋骨格ヒト型ロボットの走行".
("Musculoskeletal Force Control for Bipedal Running of an Athlete Robot".)
新山龍馬, 西川鋭, 國吉康夫.
(
Ryuma Niiyama, Satoshi Nishikawa and Yasuo Kuniyoshi.)
第28回 日本ロボット学会学術講演会,
1P1-6, 愛知県名古屋市, Sept. 2010.
bibtex
|

|
1.
"筋骨格ロボットによる走行実現のための筋賦活パタン制御"
("Muscle Activation Pattern Control for Running of Musculoskeletal Robot".)
西川鋭,
新山龍馬, 國吉康夫.
(Satoshi Nishikawa,
Ryuma Niiyama and Yasuo Kuniyoshi.)
日本機械学会 ロボティクス・メカトロニクス講演会2010 (Robomec2010),
1A2-A07, 北海道旭川市, Jun. 2010.
article (link) |
bibtex
|
Events
|
|
1.
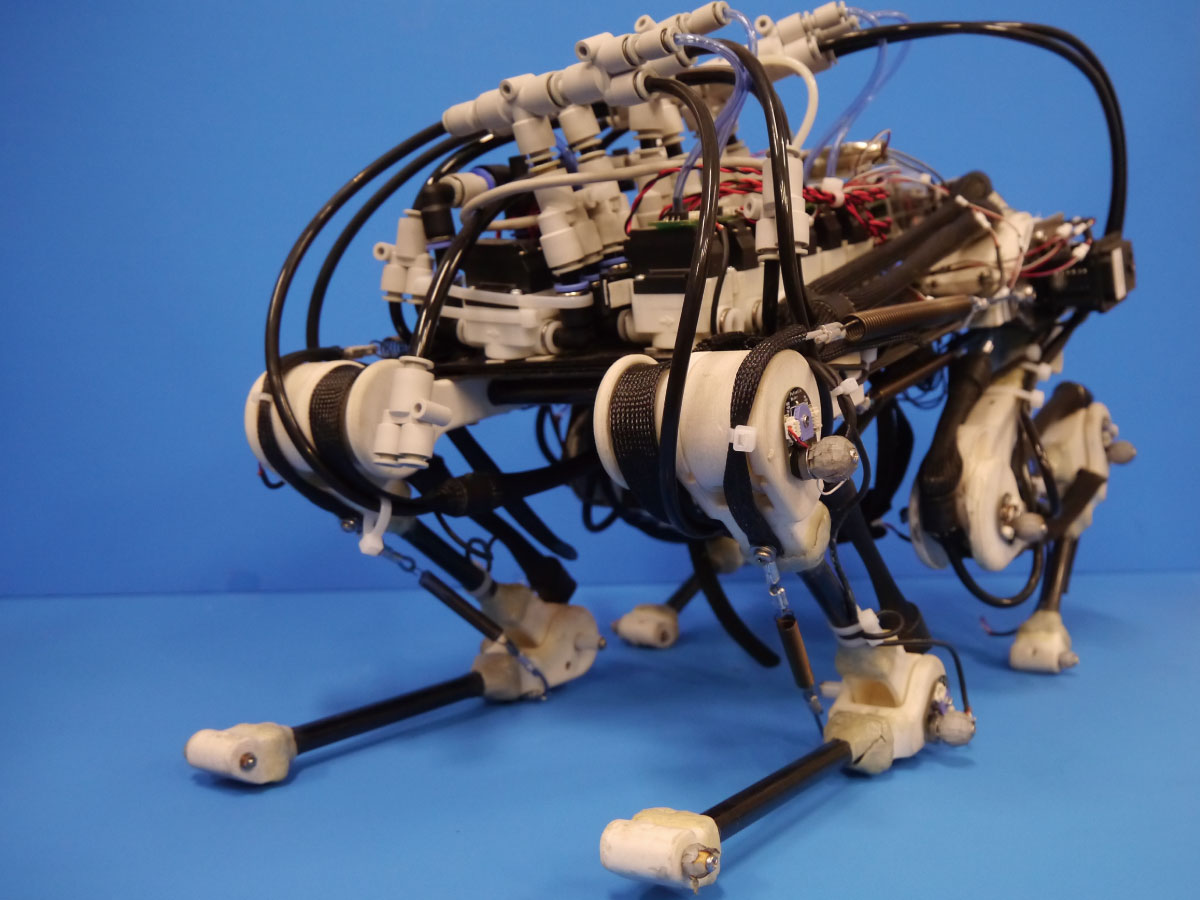
"四脚筋骨格ロボット: PIGORASS"
("Musculoskeletal Quadruped Robot: PIGORASS")
.
西川鋭,
山田康智, 志田和也
(Satoshi Nishikawa,
Yasunori Yamada and Kazuya Shida).
iii Exhibition 12, Tokyo, Japan, Dec. 2010.
introduction (link)
|
Media
|
2.
"Watch a badminton robot practice its game winning trick shots"
.
DAILY NEWS 23 May 2018, NewScientist.
link
|
|
|
1.
"走るロボットを作って分かること 体の構造を駆使する賢い脳"
.
Science Window, 2012年夏号 (7-9月) [特集] それでも人は走る, p.10-11, 独立行政法人 科学技術振興機構.
link
|
Videos

|
6.
"Triton: Musculoskeletal Swimming Robot"
.
UT ISI Lab channel. YouTube.
link
|

|
5.
"Jumping Gum Stick: Compliant Bistable jumping robot module"
.
UT ISI Lab channel. YouTube.
link
|
|
|
4.
"Humanoid robot plays badminton with pneumatic cable cylinders"
.
UT ISI Lab channel. YouTube.
link
|

|
3.
"Humanoid robot plays volleyball (jump-and-hit) with pneumatic cable cylinders"
.
UT ISI Lab channel. YouTube.
link
|

|
2.
"筋骨格アスリートロボット"
("Musculoskeletal Athlete Robot")
.
機械情報工学科 研究室紹介 知能情報システム研究室.
link (including Mowgli developed by Ryuma Niiyama)
|

|
1.
"Athlete Robot: Sprint Running"
.
YouTube.
link
|
|
|
|
|