経歴
学士(工学)
豊田工業大学, 2012.
制御システム研究室
修士在学中
東京大学大学院学際情報学府, 2012~
國吉研究室 (知能情報システム研究室)
研究テーマ
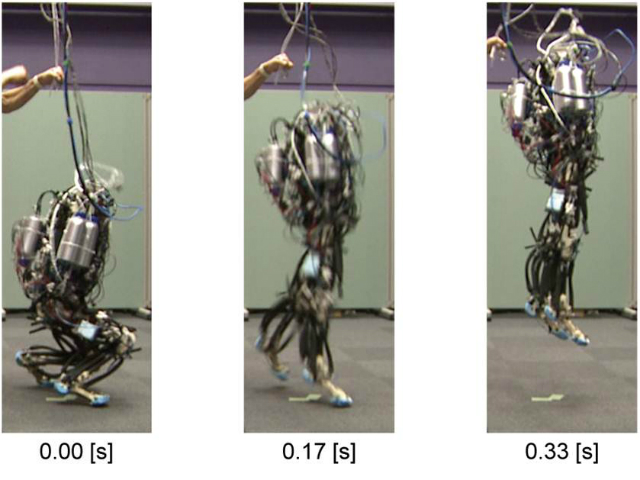
- 生物規範型ロボット
- 脚式ロボット
- ダイナミック動作
- 身体構造の活用
受賞
-
優秀講演賞第13回 計測自動制御学会システムインテグレーション部門講演会(SICE SI), Dec. 2012.
業績
学術論文誌
査読付き国際学会
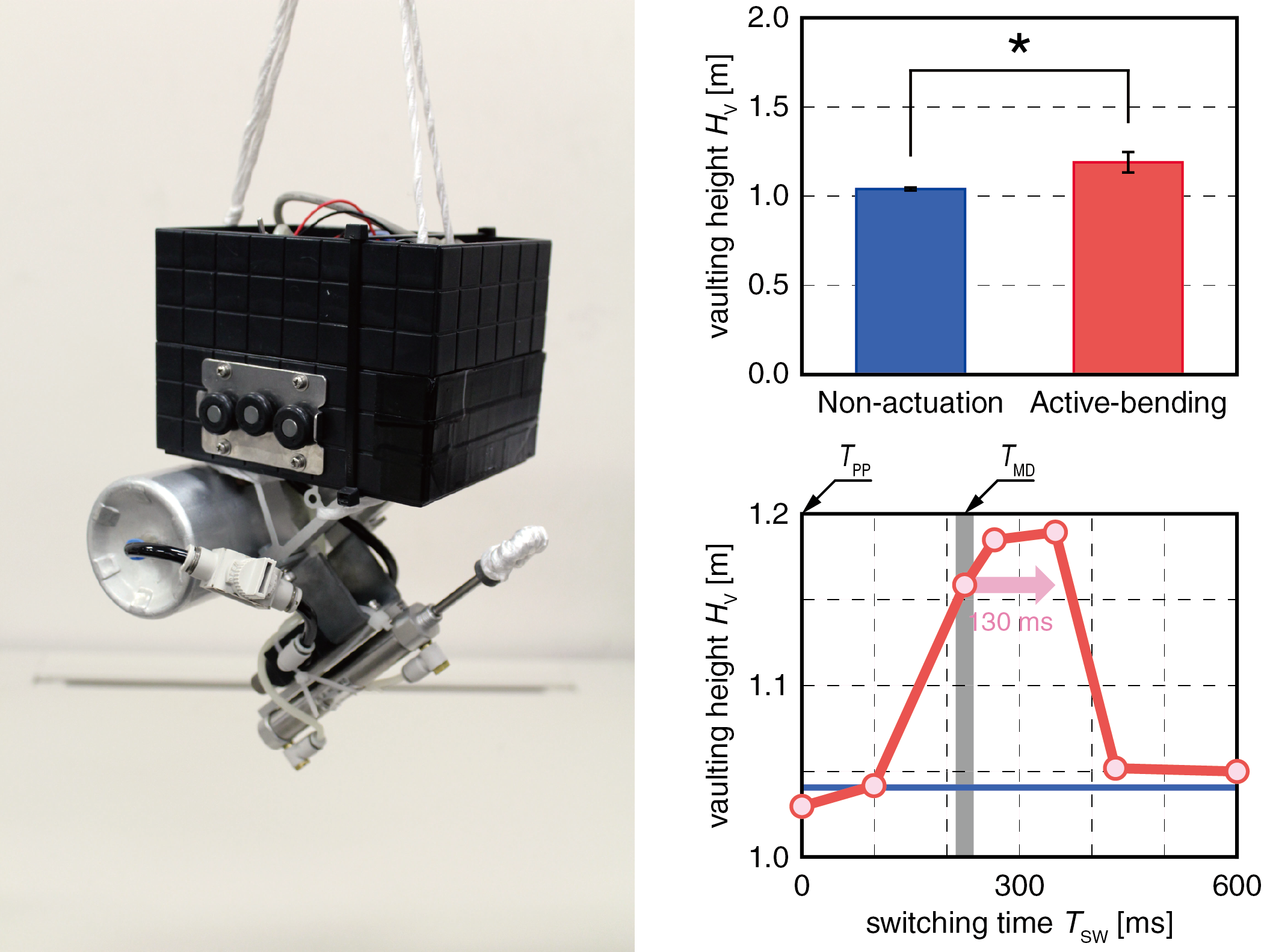
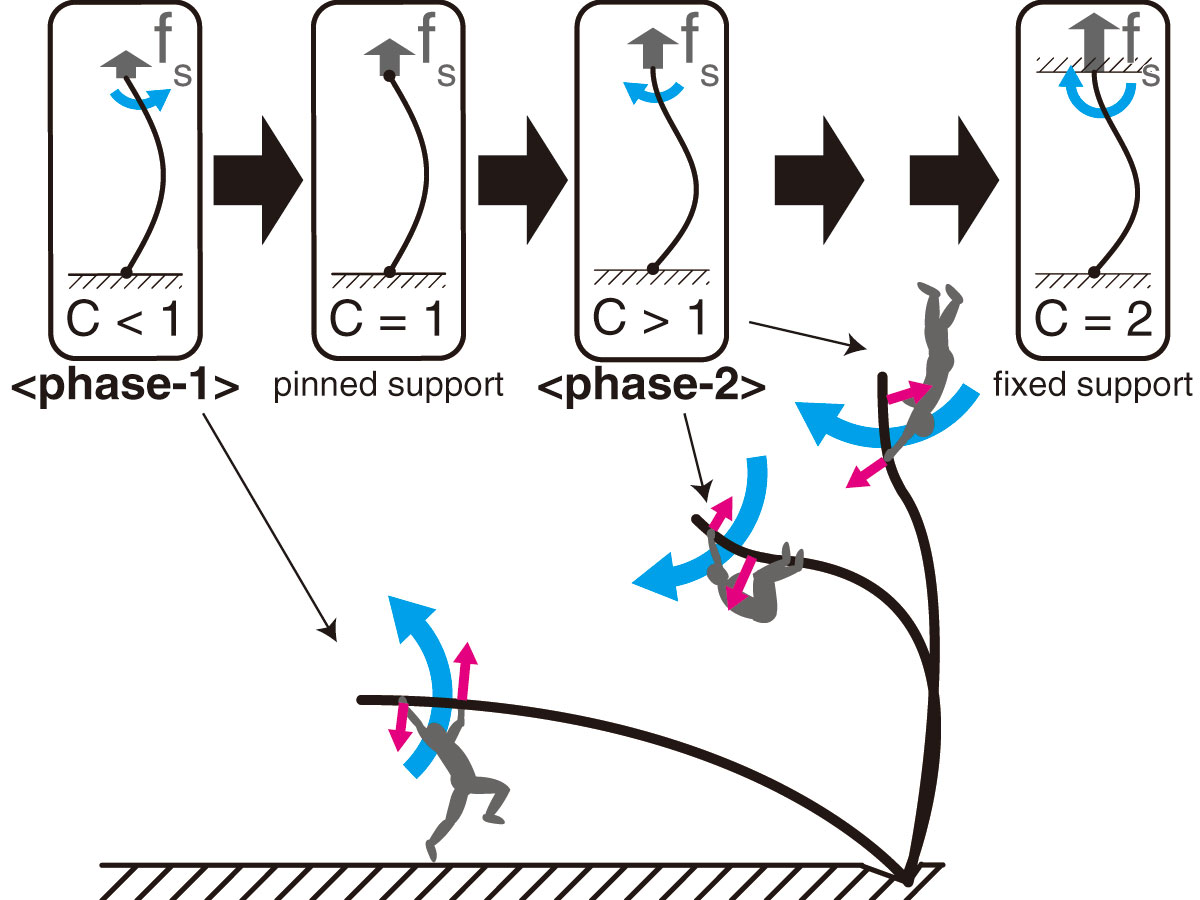
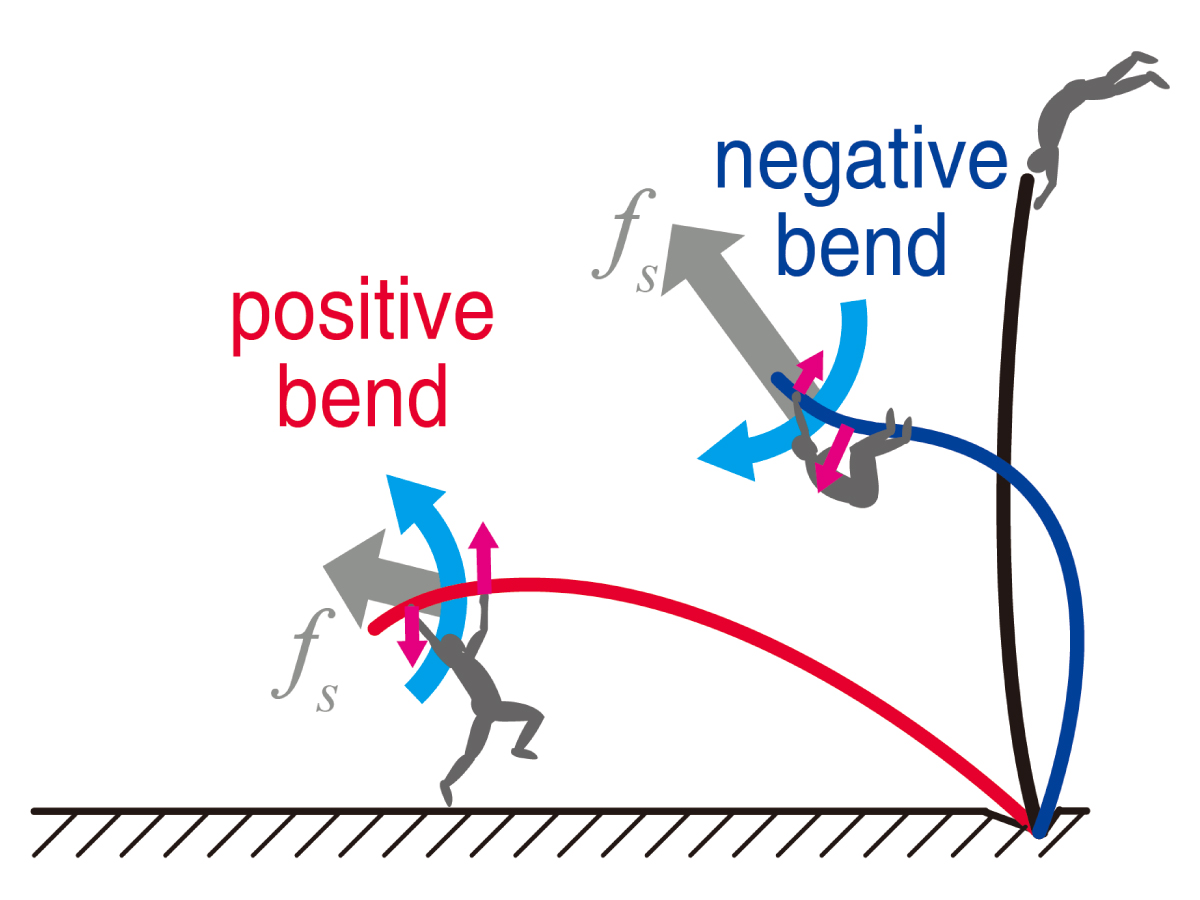
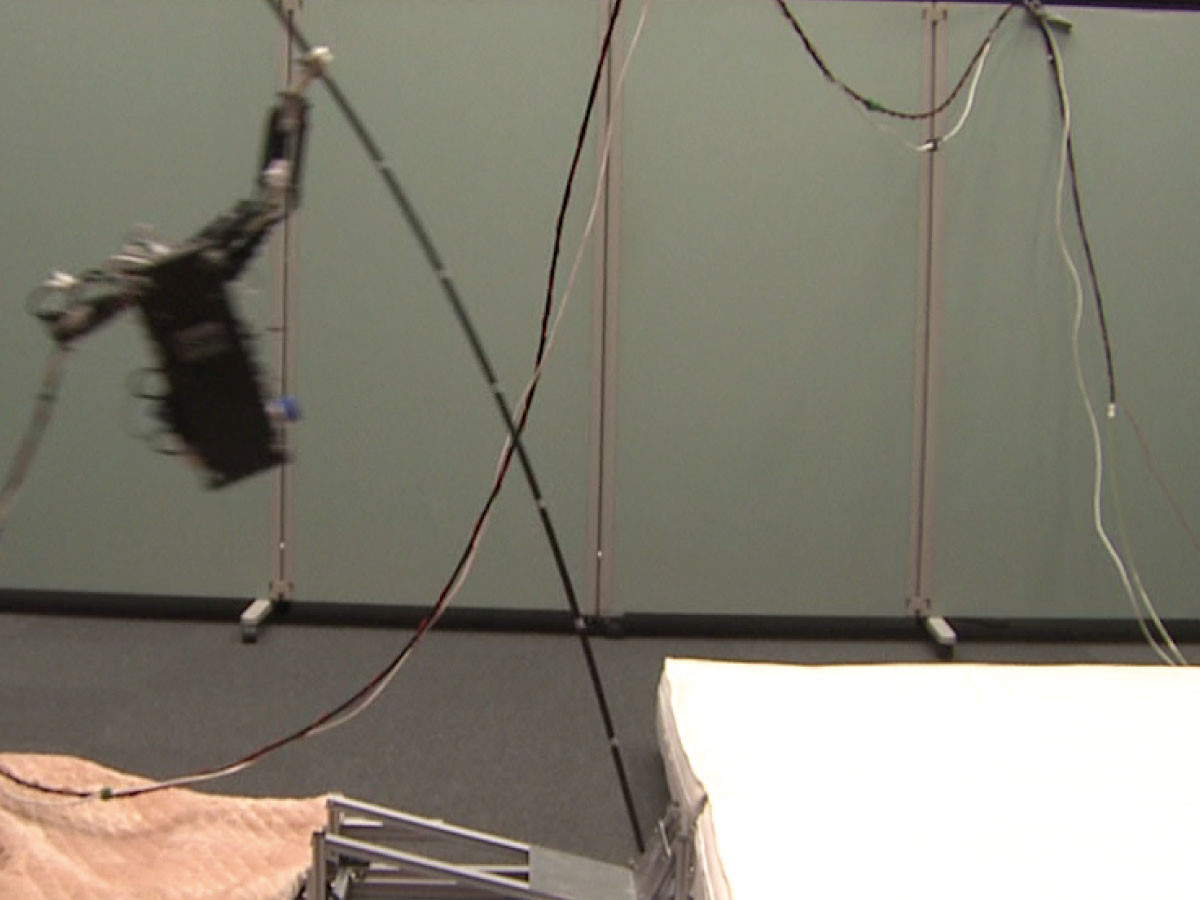
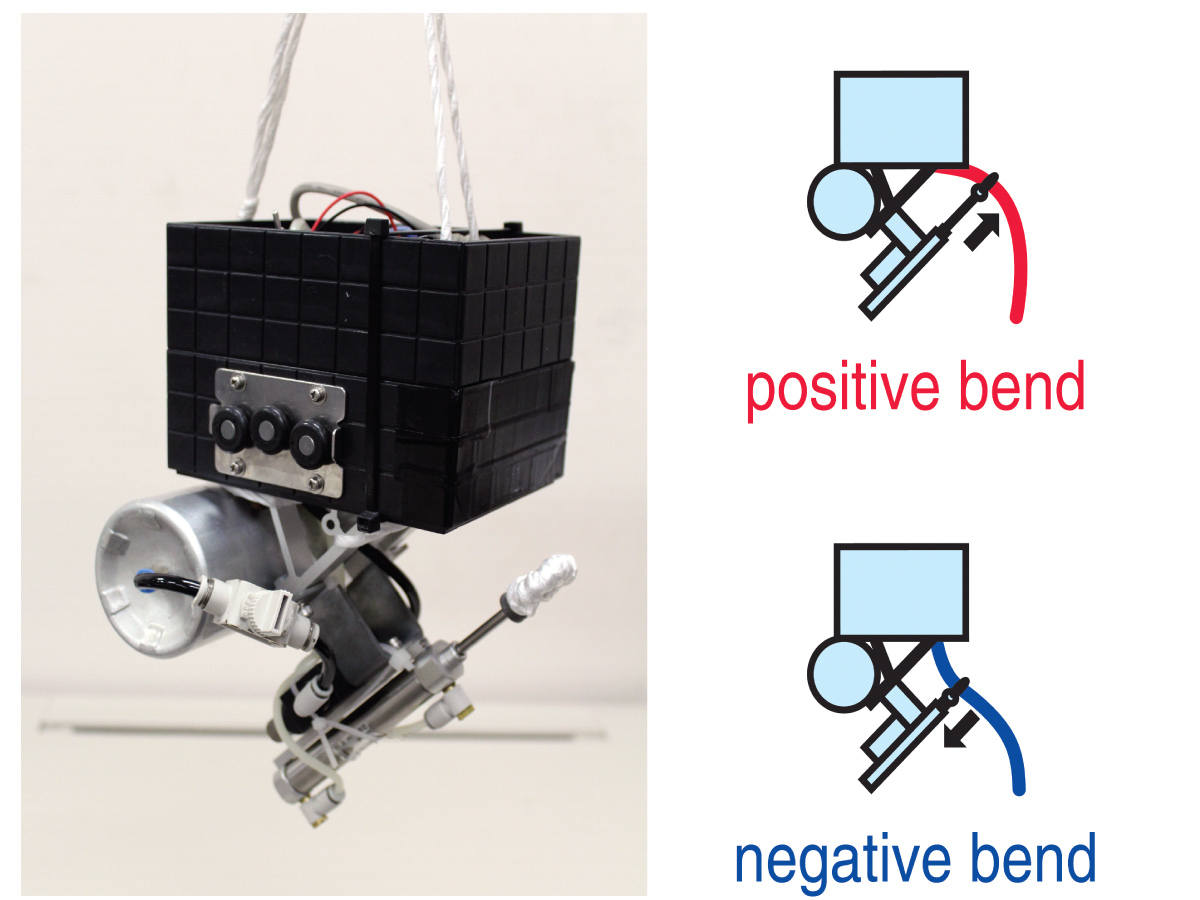
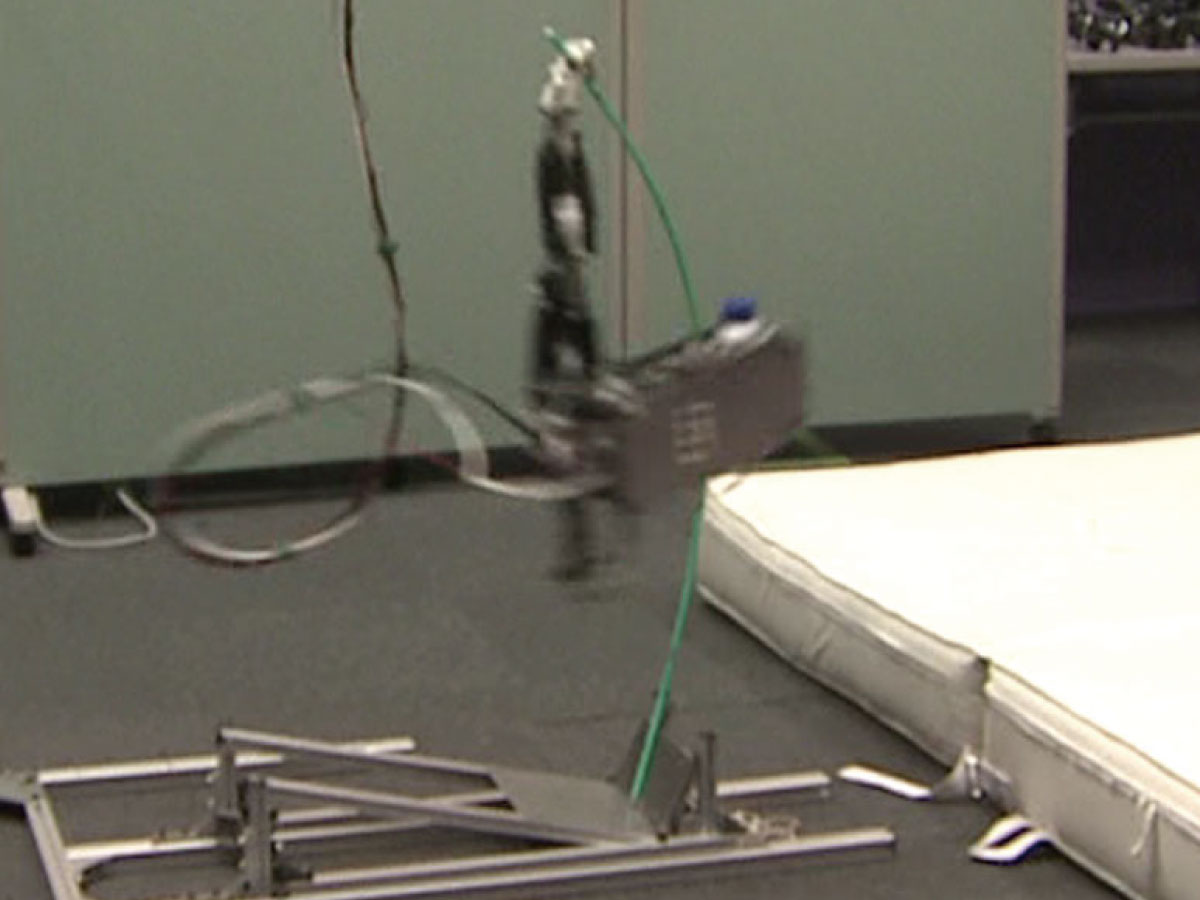
Active Bending Motion of Pole Vault Robot to Improve Reachable Height,
IEEE International Conference on Robotics and Automation (ICRA),
Hong Kong, China, May. 2014 (accepted).
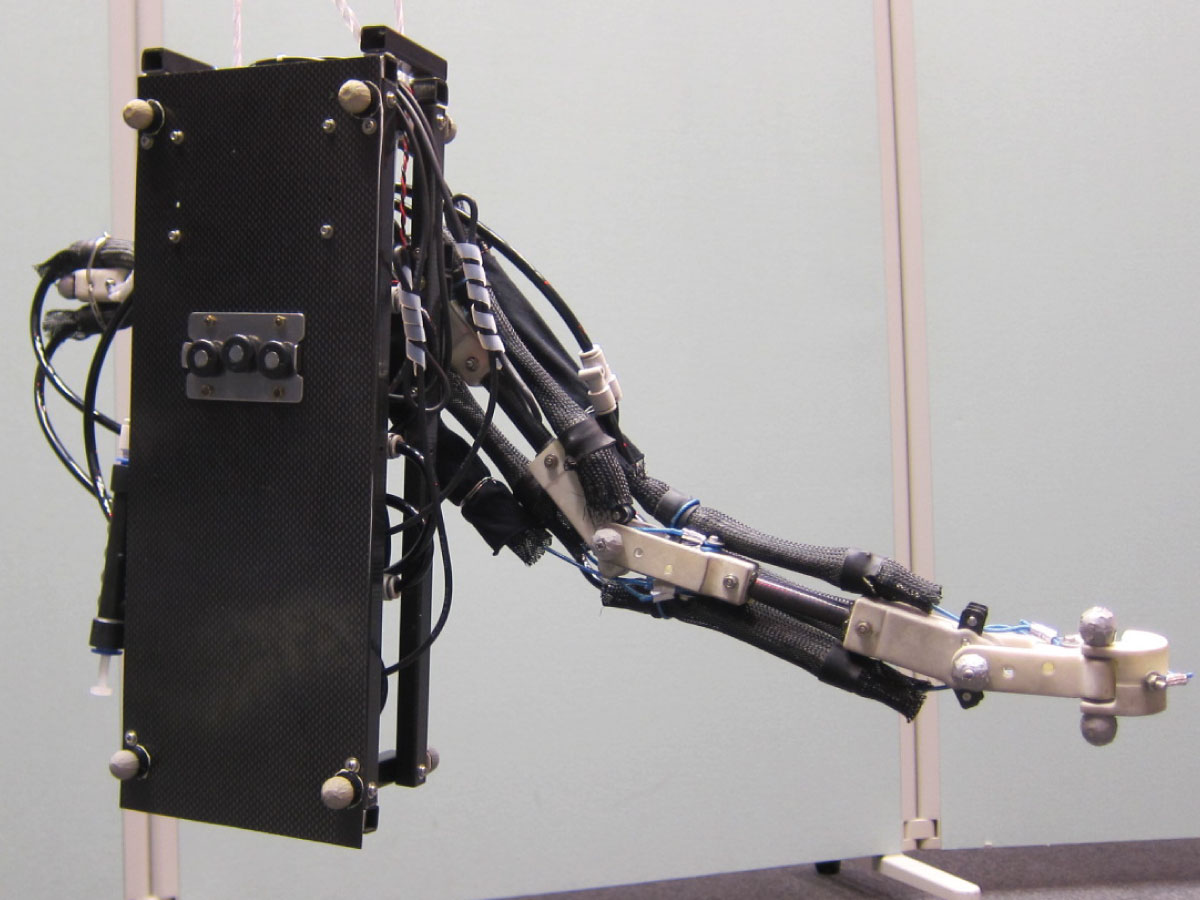
Effective Timing of Swing Up Motion by Pole Vaulting Robot,
16th International Conference on Advanced Robotics (ICAR),
Montevideo, Uruguay, Nov. 2013.
国内学会
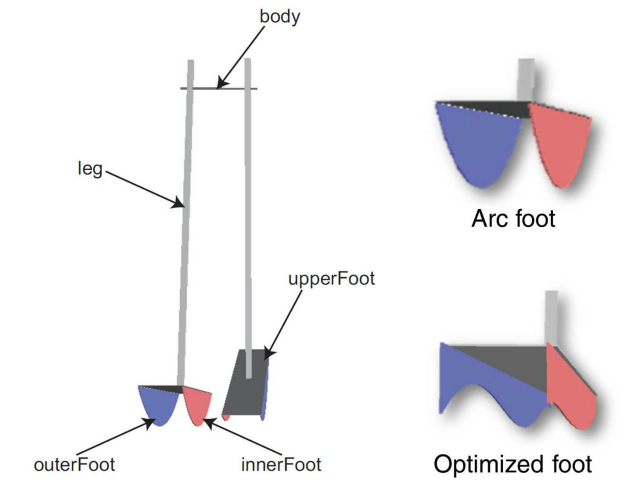
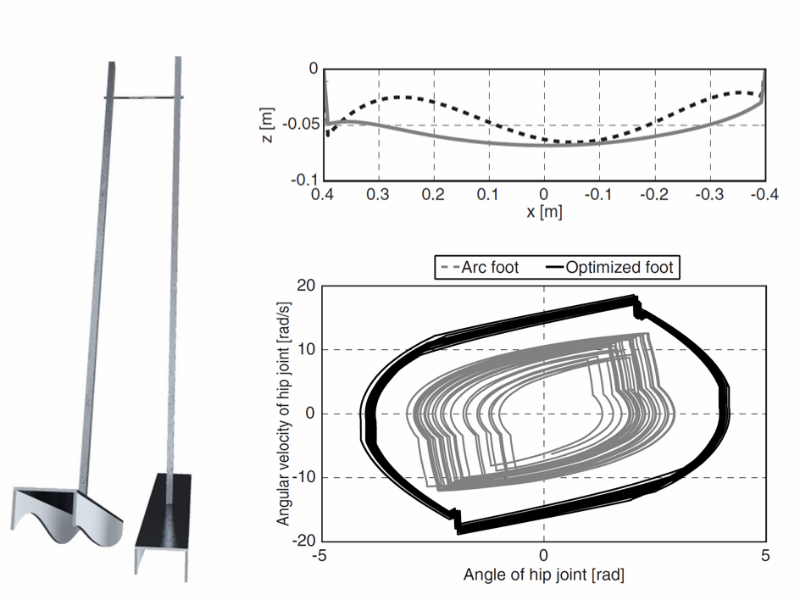
受動歩行機の足形状最適化による歩行安定化,
第13回 計測自動制御学会システムインテグレーション部門講演会(SICE SI),
pp. 1447-1452, 2F3-4, 福岡, Dec. 2012.

