Biography
BS of Engineering,
Toyota Technological Institute, Japan, 2012.
Control System Laboratory
MA student,
Grad. School of Interdisciplinary Information Studies, The University of Tokyo, Japan, 2012~.
Kuniyoshi Laboratory (ISI)
Research Keywords
- Bio-inspired robot
- legged robot
- Dynamic motion
- Utilizing body dynamics
Awards
-
Presentation Award
The 13th SICE System Integration Division Annual Conference (SICE SI), Dec. 2012.
Publications
Journals
International Conferences (Refereed)
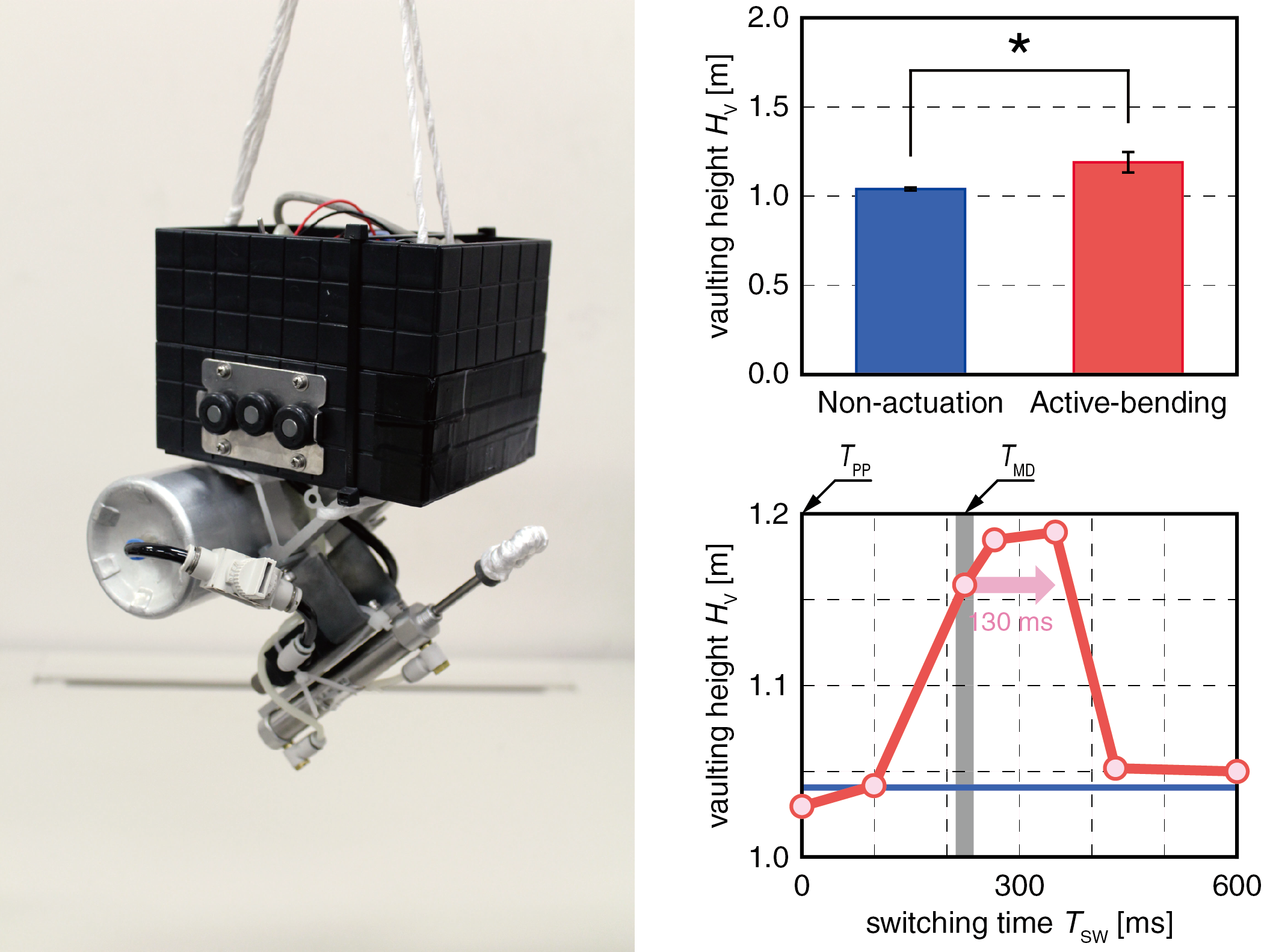
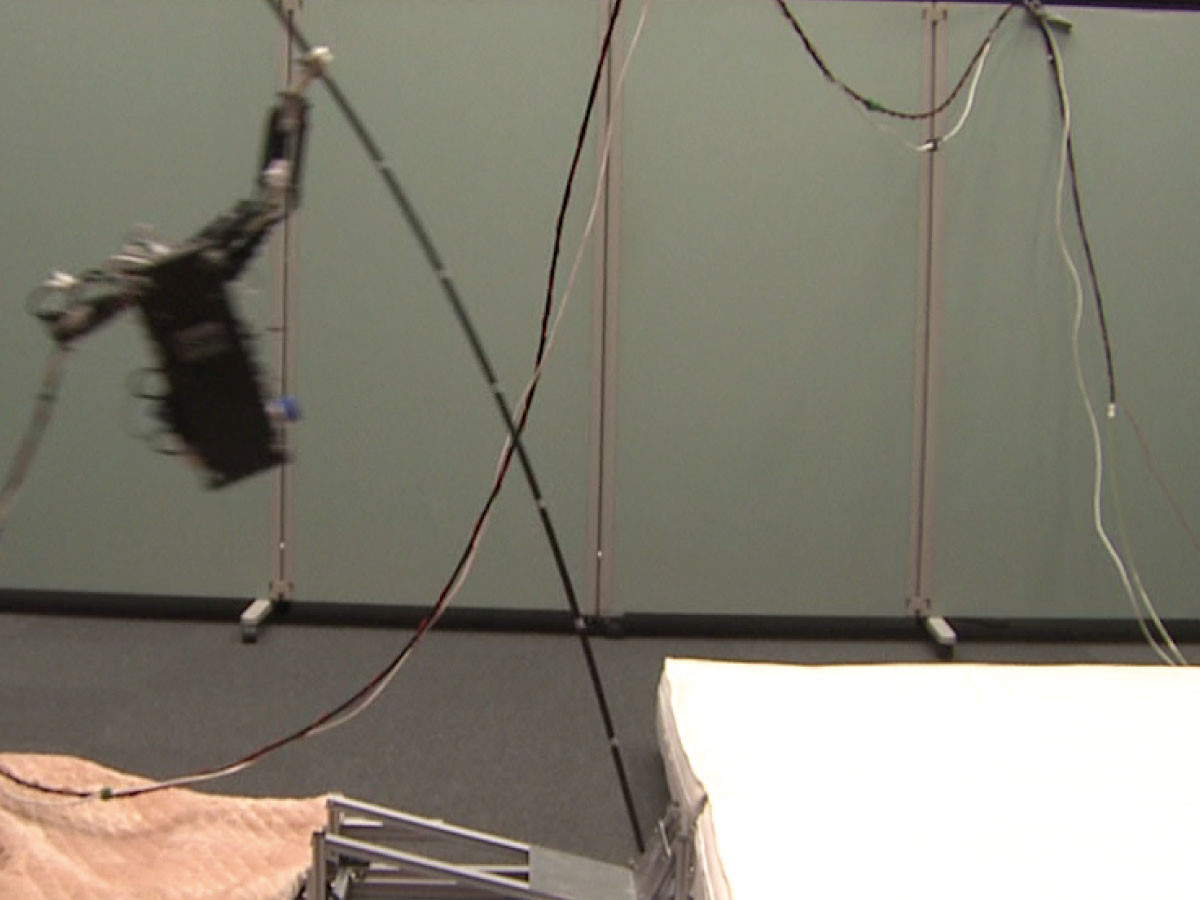
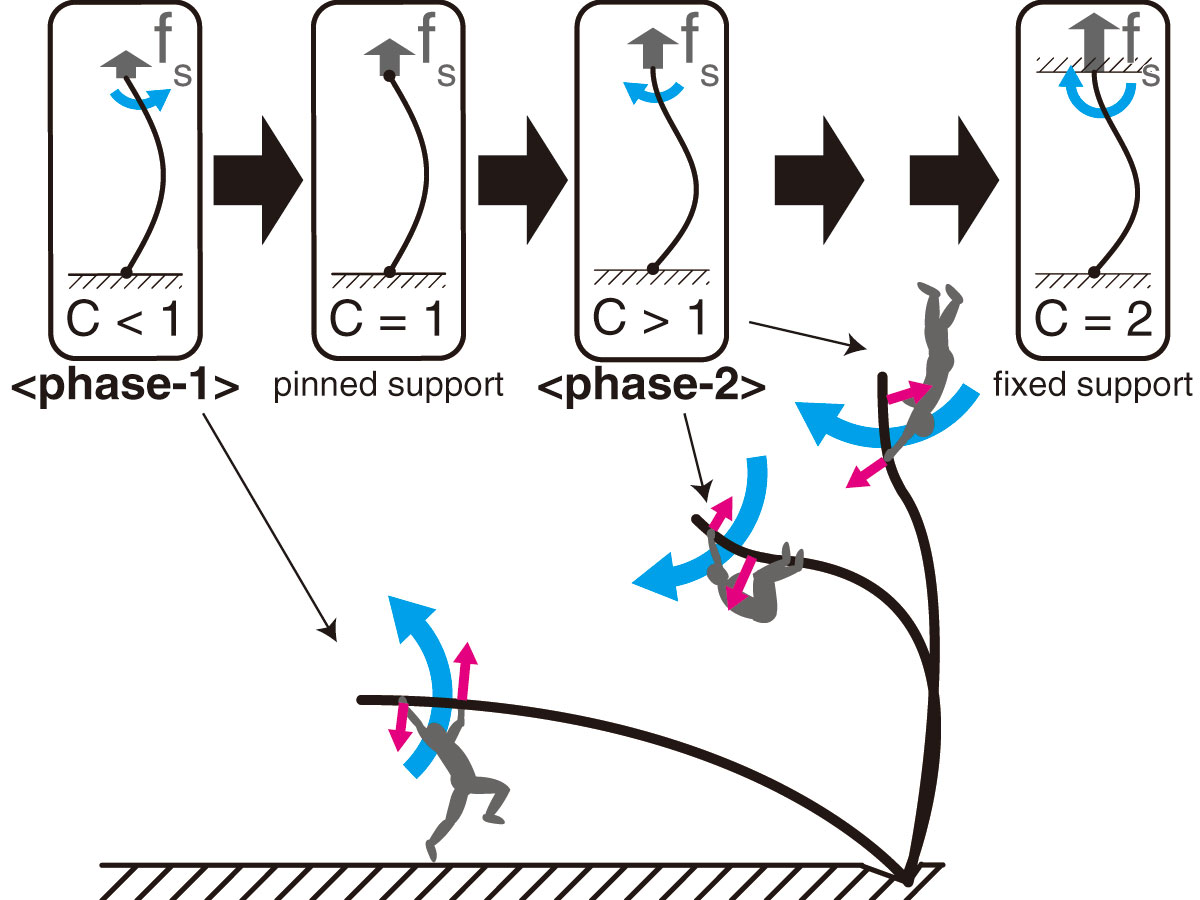
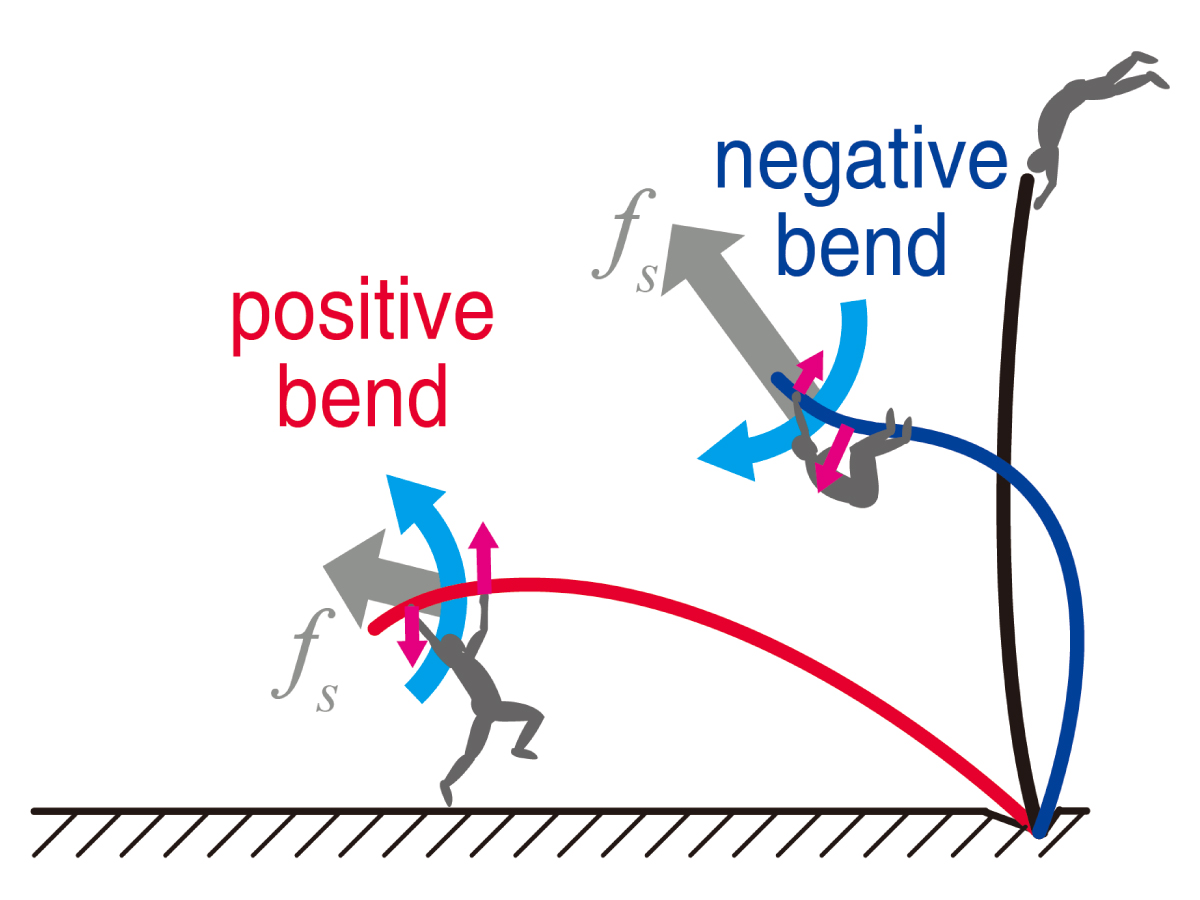
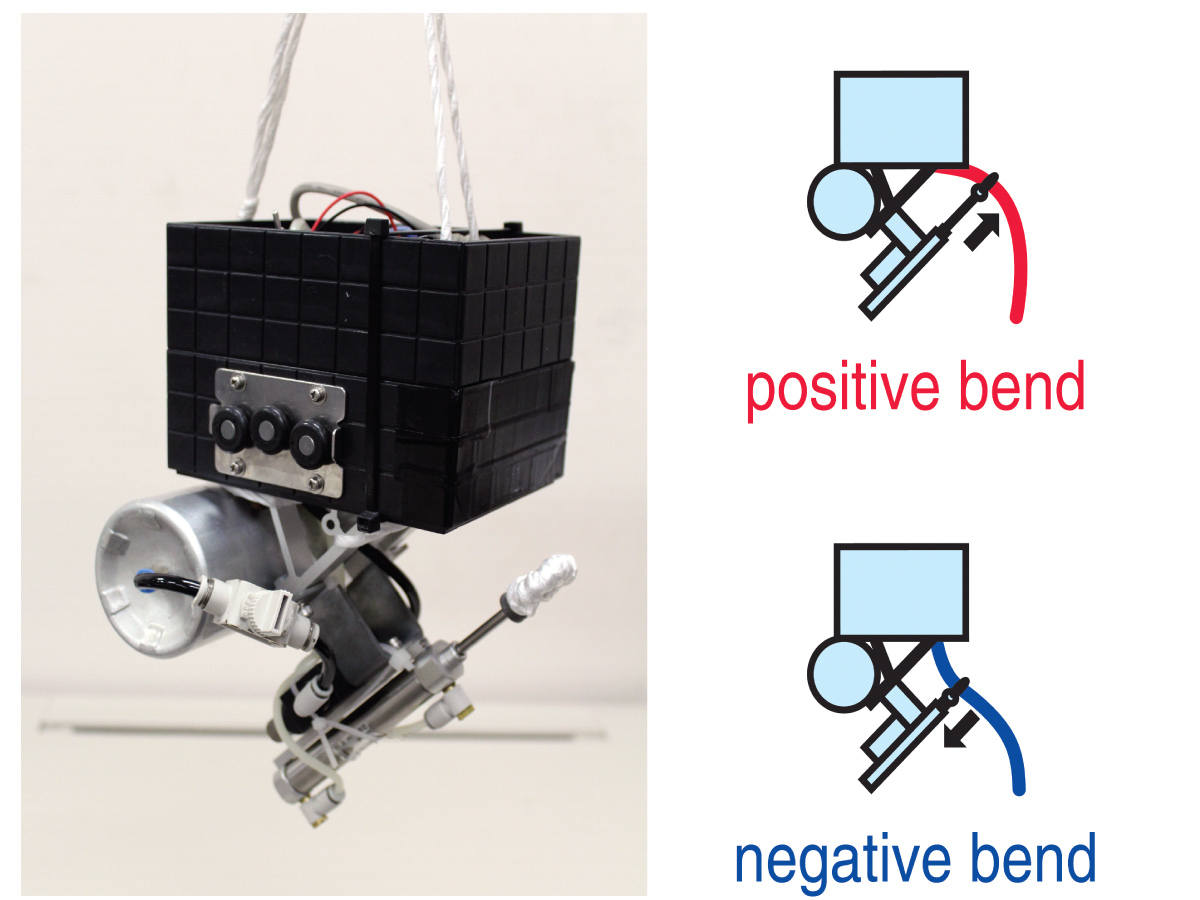
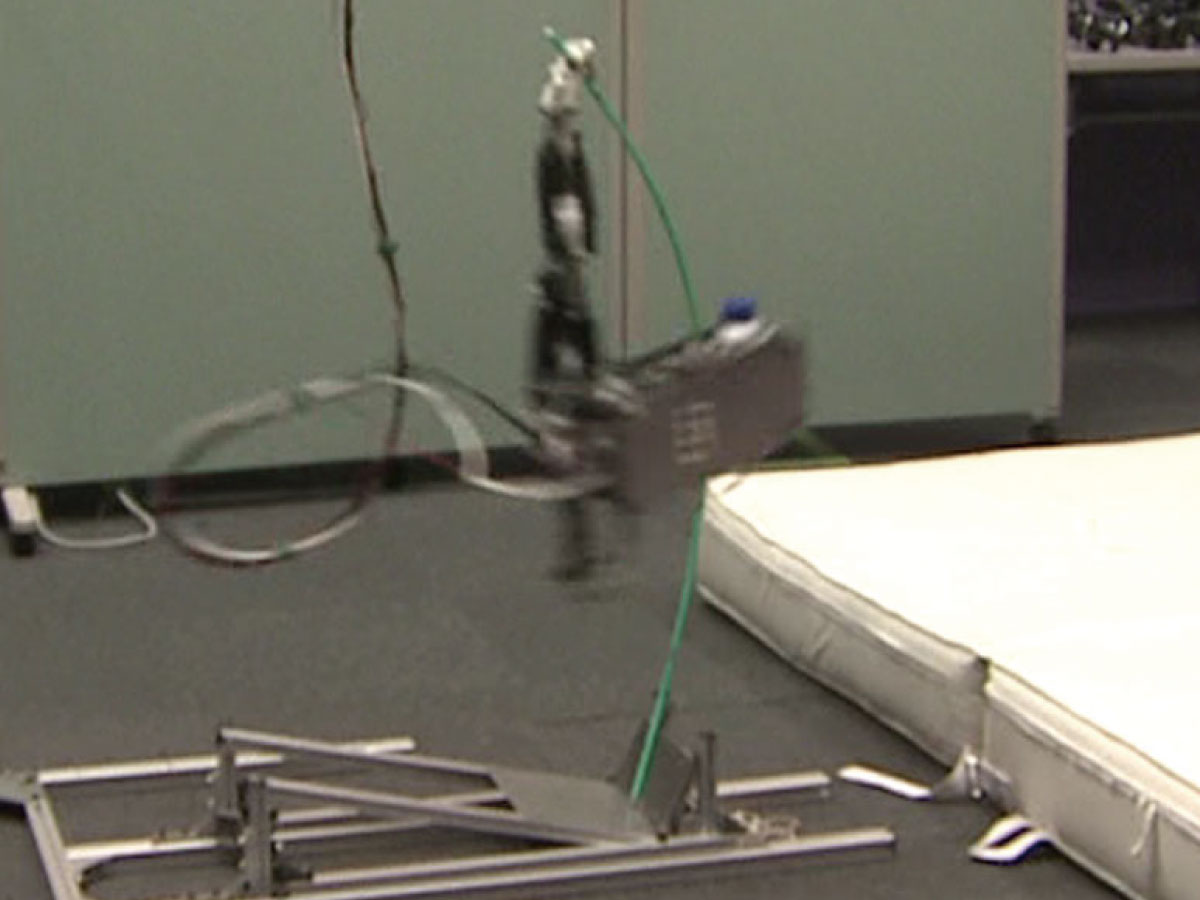
Active Bending Motion of Pole Vault Robot to Improve Reachable Height,
IEEE International Conference on Robotics and Automation (ICRA),
Hong Kong, China, May. 2014 (accepted).
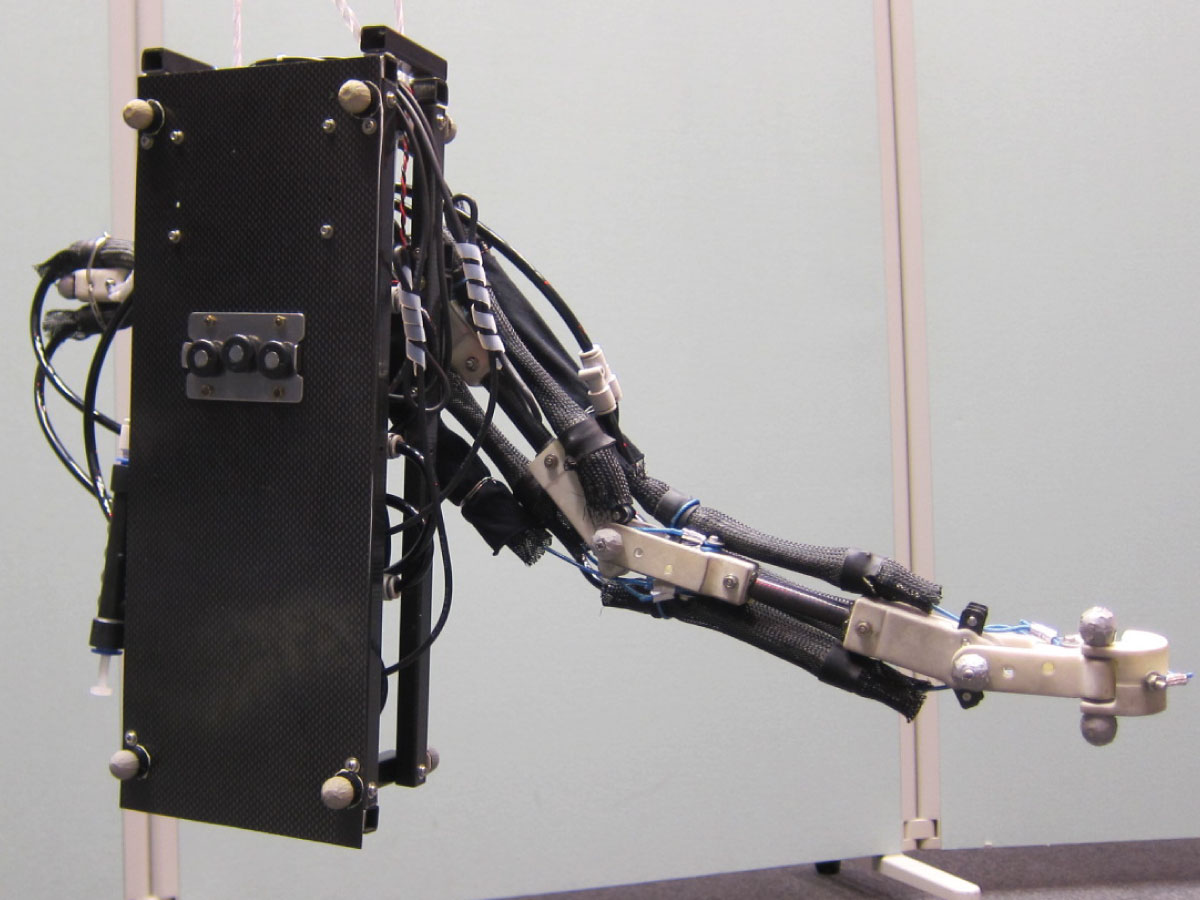
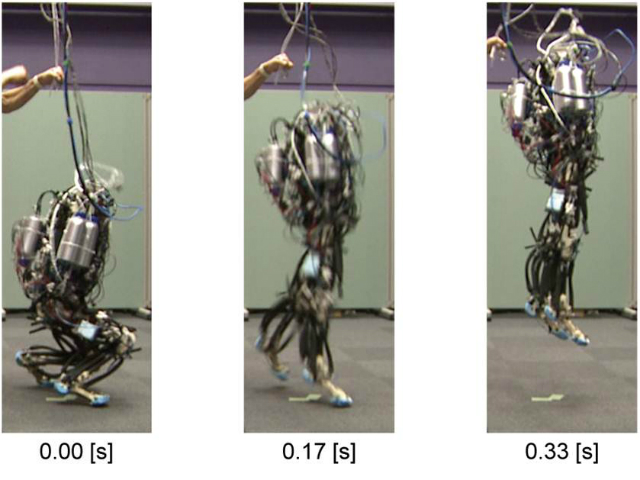
Effective Timing of Swing Up Motion by Pole Vaulting Robot,
16th International Conference on Advanced Robotics (ICAR),
Montevideo, Uruguay, Nov. 2013.
Domestic Conferences (in Japanese)
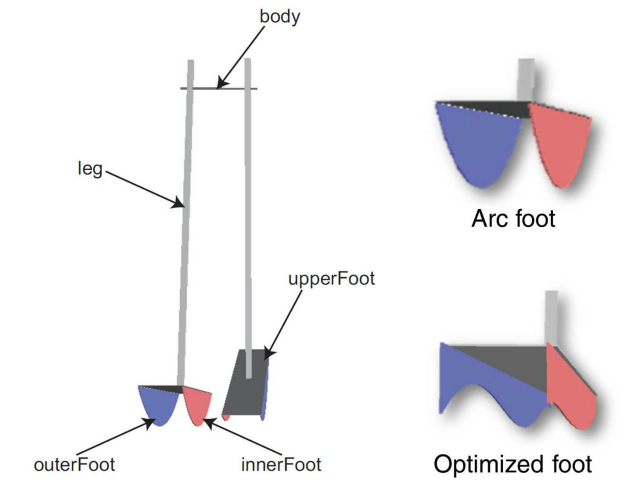
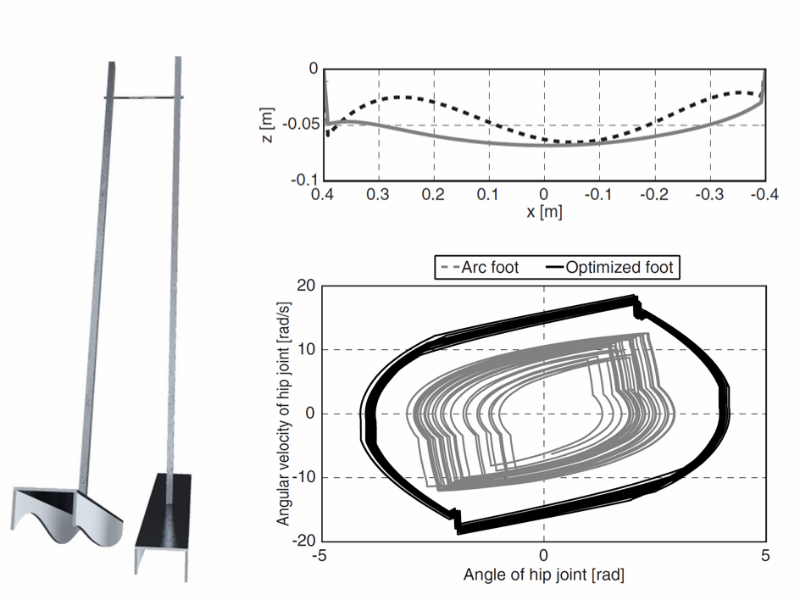
受動歩行機の足形状最適化による歩行安定化,
第13回 計測自動制御学会システムインテグレーション部門講演会(SICE SI),
pp. 1447-1452, 2F3-4, 福岡, Dec. 2012.
Events
Presentation Award
The 13th SICE System Integration Division Annual Conference (SICE SI), Dec. 2012.
Active Bending Motion of Pole Vault Robot to Improve Reachable Height,
IEEE International Conference on Robotics and Automation (ICRA),
Hong Kong, China, May. 2014 (accepted).
Effective Timing of Swing Up Motion by Pole Vaulting Robot,
16th International Conference on Advanced Robotics (ICAR),
Montevideo, Uruguay, Nov. 2013.
受動歩行機の足形状最適化による歩行安定化,
第13回 計測自動制御学会システムインテグレーション部門講演会(SICE SI),
pp. 1447-1452, 2F3-4, 福岡, Dec. 2012.

