-

-
Yasunori Yamada, Hoshinori Kanazawa, Sho Iwasaki, Yuki Tsukahara, Osuke Iwata, Shigehito Yamada & Yasuo Kuniyoshi
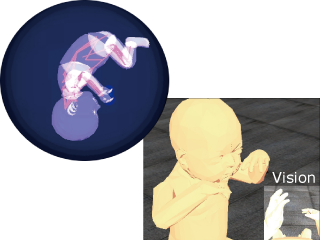
Embodied Brain Model of the Human Foetus,
Sci. Rep. 6, 27893; doi: 10.1038/srep27893 (2016)
Proceedings of International Conference
-
-
Yasunori Yamada, Keiko Fujii & Yasuo Kuniyoshi
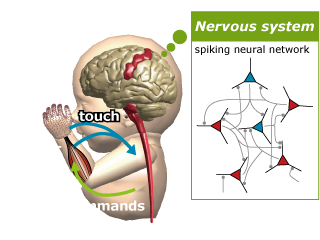
Impacts of environment, nervous system and movements of preterms on body map development: Fetus simulation with spiking neural network,
The 3rd joint IEEE International Conference on Development and Learning-EpiRob (ICDL-EpiRob), Aug, 2013.
-
-
Yasunori Yamada & Yasuo Kuniyoshi
Embodiment guides motor and spinal circuit development in vertebrate embryo and fetus,
The 2nd joint IEEE International Conference on Development and Learning-EpiRob (ICDL-EpiRob), Nov, 2012.
Paper of Excellent Award
NSF Temporal Dynamics of Learning Center Travel Grant Award
IEEE Computational Intelligence Society Outstanding Student Paper Travel Grant Award
-

-
Yasunori Yamada & Yasuo Kuniyoshi
Emergent Spontaneous Movements Based on Embodiment: Toward a General Principle for Early Development,
Post-Graduate Conference on Robotics and Development of Cognition, pp. 52-55, Sep, 2012.
Student Travel Bursaries
-
-
Yasunori Yamada, Satoshi Nishikawa, Kazuya Shida, Ryuma Niiyama & Yasuo Kuniyoshi
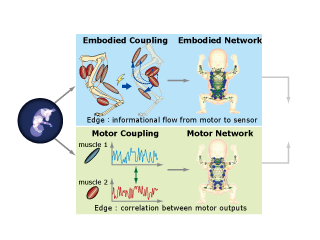
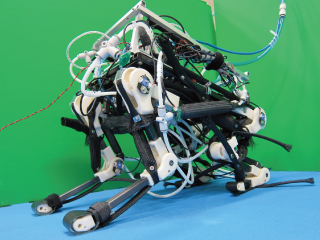
Neural-Body Coupling for Emergent Locomotion: a Musculoskeletal Quadruped Robot with Spinobulbar Model,
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1499-1506, Sep, 2011.
-
-
Yasunori Yamada, Hiroki Mori & Yasuo Kuniyoshi
A Fetus and Infant Developmental Scenario: Self-organization of Goal-directed Behaviors Based on Sensory Constraints,
10th International Conference on Epigenetic Robotics (EpiRob), pp. 145-152, Nov, 2010.
-
Norimasa Namioka, Yasunori Yamada, Ryuma Niiyama and Yasuo Kuniyoshi
Emergent locomotion patterns of soft-bodied robots with information maximization,
The 7th International Symposium on Adaptive Motion of Animals and Machines (AMAM), June, 2015.
Ryosuke Sasaki, Yasunori Yamada, Yuki Tsukahara & Yasuo Kuniyoshi
Tactile stimuli from amniotic fluid guides the development of somatosensory cortex with hierarchical structure using human fetus simulation,
The 3rd joint IEEE International Conference on Development and Learning-EpiRob (ICDL-EpiRob), Aug, 2013.
Alex Pitti, Hiroki Mori, Yasunori Yamada & Yasuo Kuniyoshi
A Model of Spatial Development from Parieto-Hippocampal Learning of Body-Place Associations,
10th International Conference on Epigenetic Robotics (EpiRob), pp. 89-96, Nov, 2010.
Presentations of International Conference
Yasunori Yamada, Keiko Fujii & Yasuo KuniyoshiDoes embodiment contribute to the development of consciousness? Fetus simulation with a thalamocortical model,
Association for the Scientific Study of Consciousness (ASSC) 17, Jul, 2013.
Keiko Fujii, Yasunori Yamada & Yasuo Kuniyoshi
Development of multisensory integration and prediction: Fetus simulation with cortex model,
Association for the Scientific Study of Consciousness (ASSC) 17, Jul, 2013.
Akimasa Nakashima, Yasunori Yamada & Yasuo Kuniyoshi
Uterine environment guides organization of somatosensory area: a computational approach,
Humanoids Workshop on Developmental Robotics, pp. 44-46, Nov, 2012.
Yasunori Yamada, Satoshi Nishikawa, Kazuya Shida & Yasuo Kuniyoshi
Emergent Locomotion Patterns from a Quadruped Pneumatic Musculoskeletal Robot with Spinobulbar Model,
International workshop on bio-inspired robots, Apr, 2011.
Satoshi Nishikawa, Yasunori Yamada, Kazuya Shida & Yasuo Kuniyoshi
Dynamic Motions by a Quadruped Musculoskeletal Robot with Angle-Dependent Moment Arms,
International workshop on bio-inspired robots, Apr, 2011.