Athlete Robot
Introduction
Robot Design
Active, Dynamic, and Tough
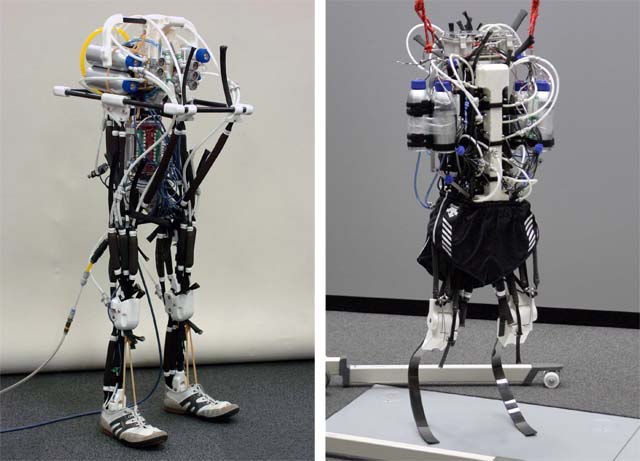
Artificial Musculoskeletal System
Other Techniques

Control
Computer Simulation
Muscle Activation Pattern
Results
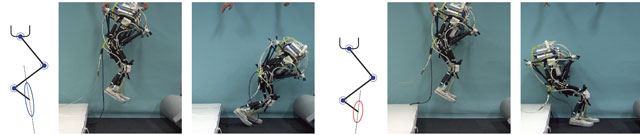
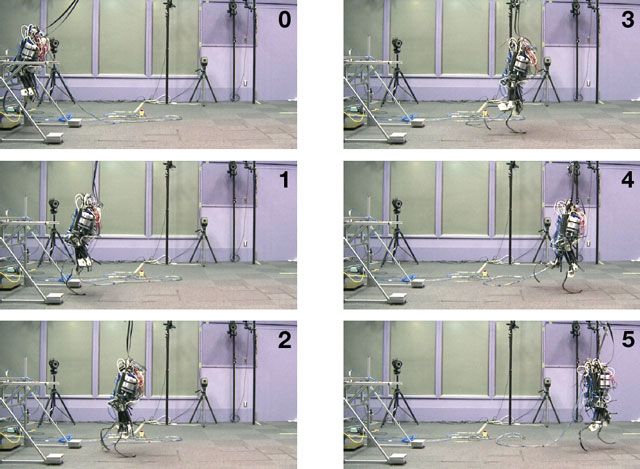
Jumping
Passive Soft Landing

Passive Bouncing
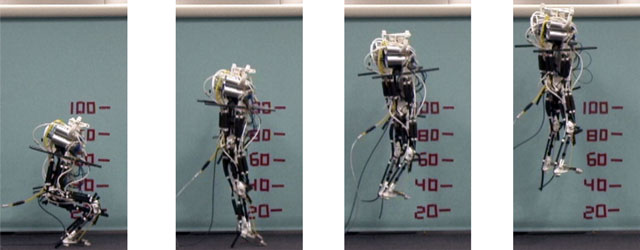
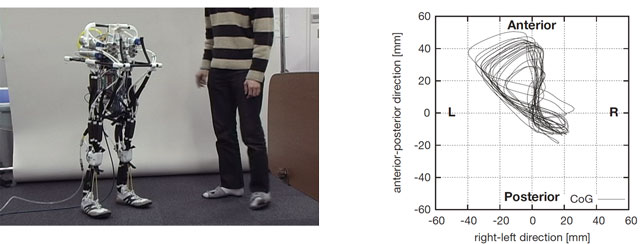
Bipedal Balancing
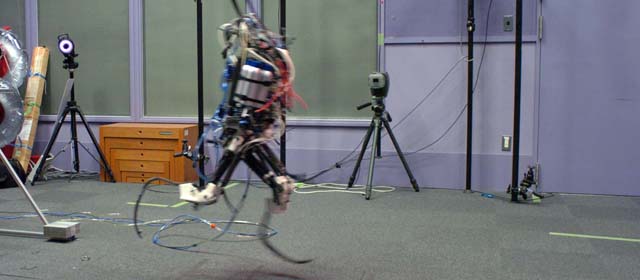
Sprinting
Ball Kicking

References
Contribution
Papers
@ARTICLE{Niiyama2010_OpenloopBipedalRunning-with-AthleteRobot,
author = {Ryuma Niiyama and Satoshi Nishikawa and Yasuo Kuniyoshi},
title = {A Biomechanical Approach to Open-loop Bipedal Running with a Musculoskeletal Athlete Robot},
journal = {Advanced Robotics},
volume = {26},
number = {3},
year = {2012},
}
@ARTICLE{Niiyama2010_MOF-Profile-for-MusculoskeletalRobot,
author = {Ryuma Niiyama and Yasuo Kuniyoshi},
title = {Design Principle Based on Maximum Output Force Profile for a Musculoskeletal
Robot},
journal = {Industrial Robot: An International Journal},
volume = {37},
number = {3},
pages = {250--255},
year = {2010},
}
@INPROCEEDINGS{Niiyama2010_Humanoids2010_AthleteRobot,
author = {Ryuma Niiyama and Satoshi Nishikawa and Yasuo Kuniyoshi},
title = {Athlete Robot with Applied Human Muscle Activation Patterns for Bipedal Running},
booktitle = {Proc. IEEE-RAS Int. Conf. on Humanoid Robots ({Humanoids 2010})},
year = {2010},
pages = {498--503},
address = {Nashville, Tennessee USA},
month = {Dec.},
}
@INCOLLECTION{Niiyama2009_MusculoskeletalAthleteRobot-BiomechanicalApproach_book,
author = {Ryuma Niiyama and Yasuo Kuniyoshi},
title = {Design of a Musculoskeletal Athlete Robot: A Biomechanical Approach},
booktitle = {Mobile Robitcs: Solutions and Challenges, Proc. of the 12th Int.
Conf. on Climbing and Walking Robots ({CLAWAR 2009})},
publisher = {World Scientific Publishing},
year = {2009},
pages = {173--180},
isbn = {978-981-4291-26-2},
}
@INPROCEEDINGS{Niiyama2008_PneumaticBiped-with-ArtificialMusculoskeletalSystem,
author = {Ryuma Niiyama and Yasuo Kuniyoshi},
title = {A Pneumatic Biped with an Artificial Musculoskeletal System},
booktitle = {Proc. 4th Int. Symposium on Adaptive Motion of Animals and Machines
({AMAM 2008})},
year = {2008},
pages = {80--81},
address = {Cleveland, Ohio USA},
month = {June},
}