Mowgli
Introduction

Mowgli (original)
Overview
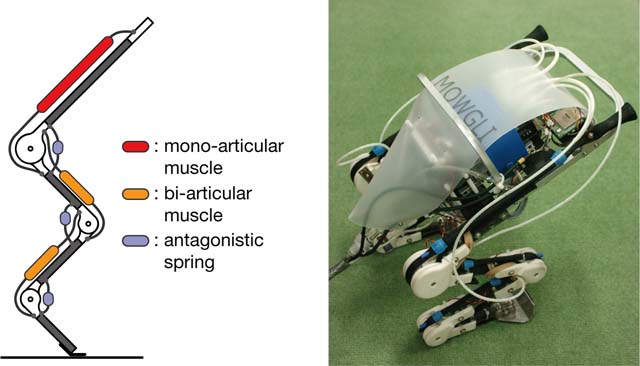
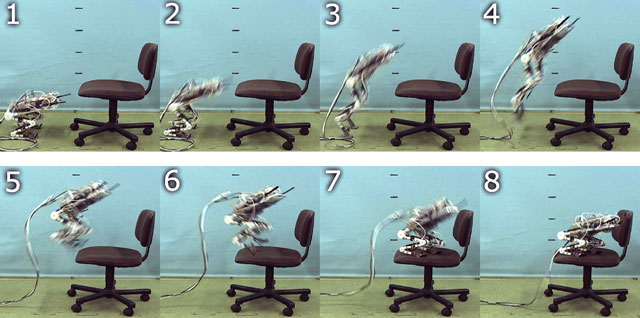
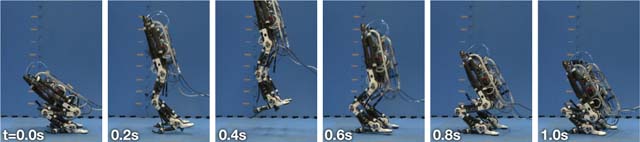
Jumping and Landing
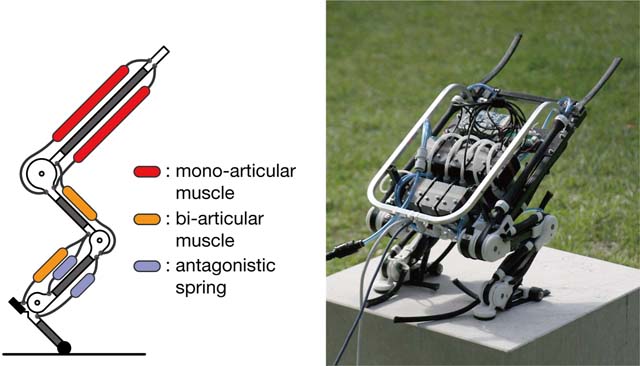
Mowgli2
Overview
Computer Simulation
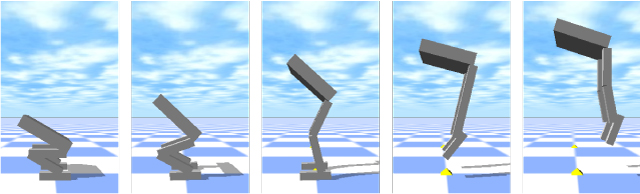
Learning jumping motion

References
Contribution
Papers
@INPROCEEDINGS{Niiyama2009_Learning-to-Jump-with-MusculoskeletalRobot,
author = {Ryuma Niiyama and Kei Kakitani and Yasuo Kuniyoshi},
title = {Learning to Jump with a Musculoskeletal Robot using a Sparse Coding
of Activation},
booktitle = {Proc. ICRA 2009 Workshop on Approaches to Sensorimotor Learning on
Humanoid Robots},
year = {2009},
pages = {30--31},
address = {Kobe, Japan},
month = {May},
}
@INPROCEEDINGS{Niiyama2007_Mowgli-BipedalJumping-and-LandingRobot,
author = {Ryuma Niiyama and Akihiko Nagakubo and Yasuo Kuniyoshi},
title = {Mowgli: A Bipedal Jumping and Landing Robot with an Artificial Musculoskeletal
System},
booktitle = {Proc. IEEE Int. Conf. on Robotics and Automation ({ICRA 2007})},
year = {2007},
pages = {2546--2551 ({ThC5.2})},
address = {Roma, Italy},
month = {April},
}