Gemotion Screen
2006–2008
Introduction
A Gemotion Screen is an 3D display that allows dynamic expression of a 3D form not as a visual illusions, but as a physical object that can be touched. In order to control the flexible screen, we use an actuator array consists of a large number of pneumatic cylinders. The compliance of the pneumatic actuator is suitable for application in direct interaction with human users. The display can be used as a human-machine interface, television displays, and for other architectural applications.
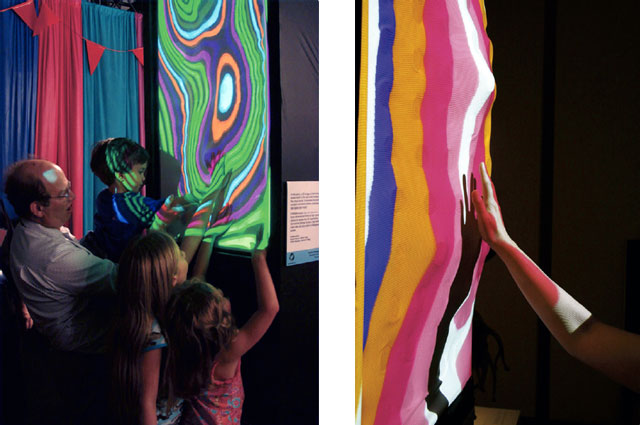
Fig.1 A bycycle driven by the Bionic Engine
System Overview
Basic Principle
We proposed a combination of the actuated flexible screen and projection of high-definition video onto the screen. The flexible screen is made of special stretch fabric is used for the system. The fabric is highly extendable in all directions. In order to control the shape of the flexible screen, we set up an actuator array consisting of a large number of telescopic drive modules.
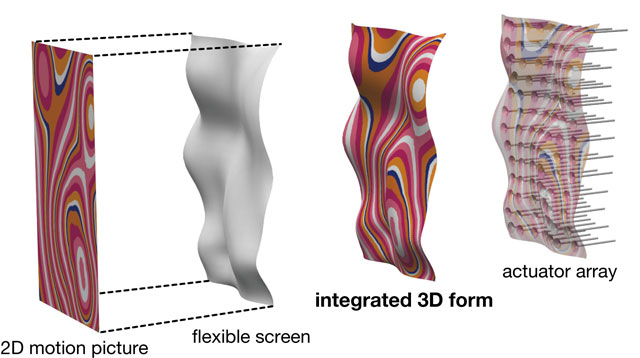
Fig.2 Two versions of robots: a prototype robot with ankle joint (left) and a final version of the Athlete Robot with blade foot(right)
The screen size is 0.9m by 1.8m (width by height). The actuators are arranged in an array of 7×15 (= 105 points), with an interval of 0.12m between points. In order to construct a single large display that combines multiple screens vertically and horizontally, the dimensions of the screen frame are carefully determined. The stroke of the air cylinder is 0.15 m, which corresponds to a movement of ±0.075m from the neutral position. The cylinder speed is rated at 0.45m/s.
Generation and Transformation of 3D video
The 3D video for our system is the 3D computer graphics generated in the host computer in real time. The 3D video is divided into two channels: the 2D video and the depth information. The 2D video is transmitted directly to the projector. The depth information is converted to gray scale and input to the screen as a standard 2D video signal. Since the system does not use any special video format, it is easy to make a 3D video content for the system.
References
Contribution
The project was organized by Yoichiro Kawaguchi. Prototyping, hardware design, and control were performed by Ryuma Niiiyama. The 3D content for the screeen was created by Masayuki Takagi, Shinichiro Yagi, Tomohiro Akagawa, and Takahiro Harada. Special thanks to Mariko Fujita and Akihiko Miyadera for fabrication.
Papers
Gemotion Screen: A Generative, Emotional, Interactive 3D Display
In Proceeding of the ASIAGRAPH 2008 in Shanghai, pp.115–120, Shanghai, China, July 2008.
BibTeX
@INPROCEEDINGS{NiiyamaKawaguchi2008_GemotionScreen-3D-Display,
author = {Ryuma Niiyama and Yoichiro Kawaguchi},
title = {Gemotion Screen: A Generative, Emotional, Interactive 3D Display},
booktitle = {Proc. ASIAGRAPH in Shanghai},
year = {2008},
pages = {115--120},
address = {Shanghai, China},
month = {July},
}
Exhibitions
Gemotion Screen
Japan Media Arts Festival 10th Anniversary Exhibition "The Power of Expression, JAPAN", The National Art Center, Tokyo, Japan, Jan. 2007.