Mowgli
Sample Content
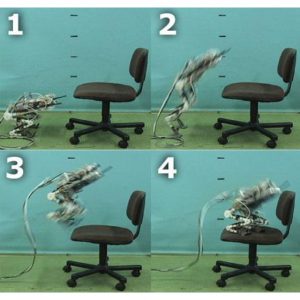
椅子への飛び乗り

外観
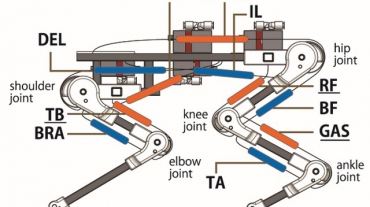
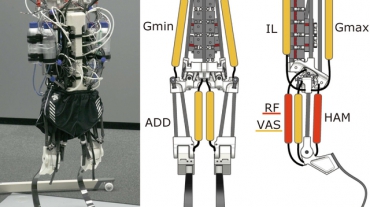
ダイナミックな運動を実現するための身体の役割を明らかにすることを目指して製作された2脚の跳躍ロボット。身体の構造の中でも筋骨格系に着目し、空気圧人工筋アクチュエータを用いた人工筋骨格系を組み込んでいる。抗重力筋や2関節筋を備え、垂直跳びや椅子への跳び乗りを実現した。跳躍の際、腰から足先への脚伸展の順序の再現が見られ、また、シミュレーションにより物理的なフィードバックによる外乱へのロバスト性を示した。2号機では、筋指令切り替えパタンによる跳躍着地の学習を行い、実世界上での運動学習を実現した。
[1] R. Niiyama, A. Nagakubo and Y. Kuniyoshi, “Mowgli: A Bipedal Jumping and Landing Robot with an Artificial Musculoskeletal System,” ICRA, 2007.[2] R. Niiyama, K. Kakitani and Y. Kuniyoshi, “Learning to Jump with a Musculoskeletal Robot using a Sparse Coding of Activation,” ICRA, 2009. PDF